 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGP-SLAM+: real-time 3D lidar SLAM based on improved regionalized Gaussian process map reconstruction
Paper and Code
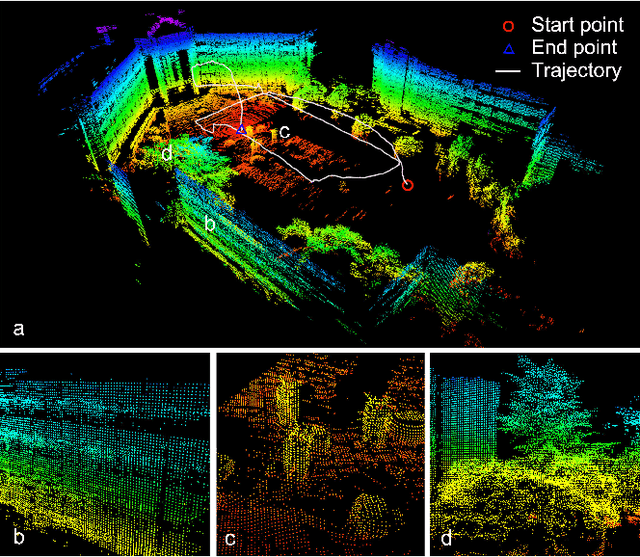
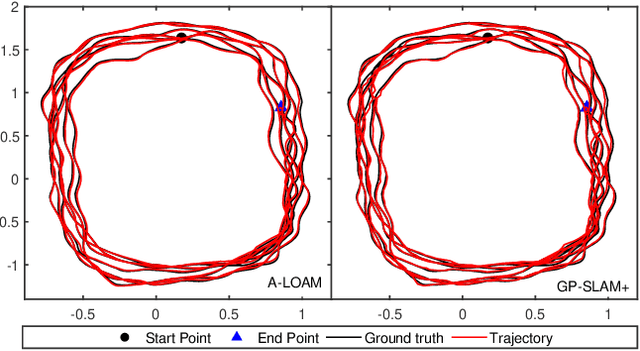
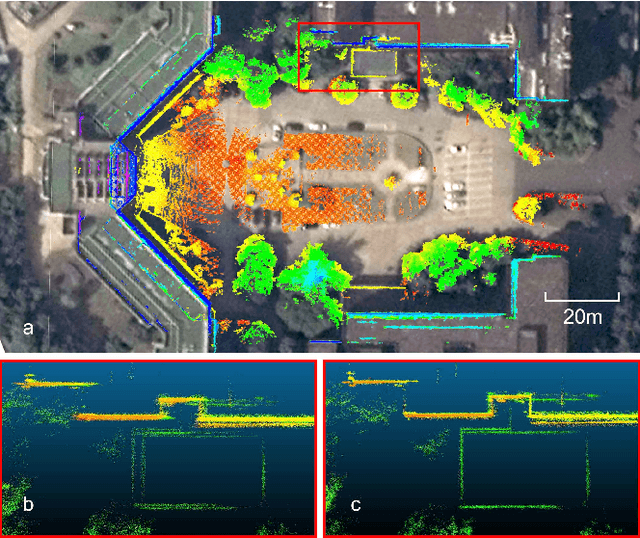
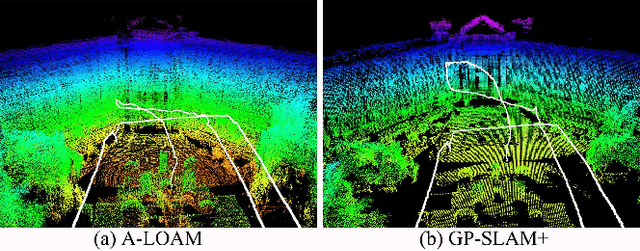
This paper presents a 3D lidar SLAM system based on improved regionalized Gaussian process (GP) map reconstruction to provide both low-drift state estimation and mapping in real-time for robotics applications. We utilize spatial GP regression to model the environment. This tool enables us to recover surfaces including those in sparsely scanned areas and obtain uniform samples with uncertainty. Those properties facilitate robust data association and map updating in our scan-to-map registration scheme, especially when working with sparse range data. Compared with previous GP-SLAM, this work overcomes the prohibitive computational complexity of GP and redesigns the registration strategy to meet the accuracy requirements in 3D scenarios. For large-scale tasks, a two-thread framework is employed to suppress the drift further. Aerial and ground-based experiments demonstrate that our method allows robust odometry and precise mapping in real-time. It also outperforms the state-of-the-art lidar SLAM systems in our tests with light-weight sensors.