 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGBD-based Parameter Extraction for Door Opening Tasks with Human Assists in Nuclear Rescue
Oct 16, 2016
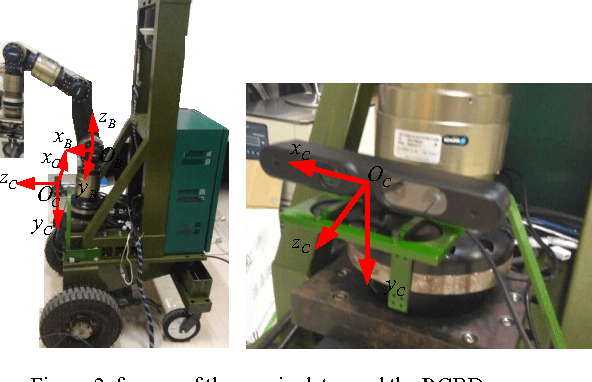

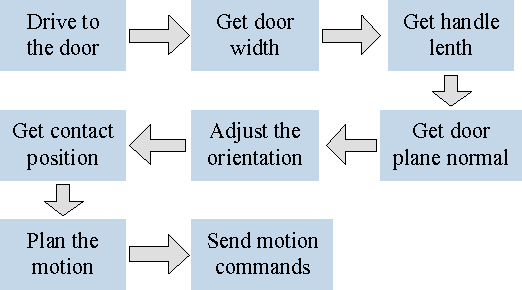
The ability to open a door is essential for robots to perform home-serving and rescuing tasks. A substantial problem is to obtain the necessary parameters such as the width of the door and the length of the handle. Many researchers utilize computer vision techniques to extract the parameters automatically which lead to fine but not very stable results because of the complexity of the environment. We propose a method that utilizes an RGBD sensor and a GUI for users to 'point' at the target region with a mouse to acquire 3D information. Algorithms that can extract important parameters from the selected points are designed. To avoid large internal force induced by the misalignment of the robot orientation and the normal of the door plane, we design a module that can compute the normal of the plane by pointing at three non-collinear points and then drive the robot to the desired orientation. We carried out experiments on real robot. The result shows that the designed GUI and algorithms can help find the necessary parameters stably and get the robot prepared for further operations.