 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiHateLoc: Towards Temporal Localisation of Multimodal Hate Content in Online Videos
Dec 11, 2025The rapid growth of video content on platforms such as TikTok and YouTube has intensified the spread of multimodal hate speech, where harmful cues emerge subtly and asynchronously across visual, acoustic, and textual streams. Existing research primarily focuses on video-level classification, leaving the practically crucial task of temporal localisation, identifying when hateful segments occur, largely unaddressed. This challenge is even more noticeable under weak supervision, where only video-level labels are available, and static fusion or classification-based architectures struggle to capture cross-modal and temporal dynamics. To address these challenges, we propose MultiHateLoc, the first framework designed for weakly-supervised multimodal hate localisation. MultiHateLoc incorporates (1) modality-aware temporal encoders to model heterogeneous sequential patterns, including a tailored text-based preprocessing module for feature enhancement; (2) dynamic cross-modal fusion to adaptively emphasise the most informative modality at each moment and a cross-modal contrastive alignment strategy to enhance multimodal feature consistency; (3) a modality-aware MIL objective to identify discriminative segments under video-level supervision. Despite relying solely on coarse labels, MultiHateLoc produces fine-grained, interpretable frame-level predictions. Experiments on HateMM and MultiHateClip show that our method achieves state-of-the-art performance in the localisation task.
Revealing Temporal Label Noise in Multimodal Hateful Video Classification
Aug 06, 2025The rapid proliferation of online multimedia content has intensified the spread of hate speech, presenting critical societal and regulatory challenges. While recent work has advanced multimodal hateful video detection, most approaches rely on coarse, video-level annotations that overlook the temporal granularity of hateful content. This introduces substantial label noise, as videos annotated as hateful often contain long non-hateful segments. In this paper, we investigate the impact of such label ambiguity through a fine-grained approach. Specifically, we trim hateful videos from the HateMM and MultiHateClip English datasets using annotated timestamps to isolate explicitly hateful segments. We then conduct an exploratory analysis of these trimmed segments to examine the distribution and characteristics of both hateful and non-hateful content. This analysis highlights the degree of semantic overlap and the confusion introduced by coarse, video-level annotations. Finally, controlled experiments demonstrated that time-stamp noise fundamentally alters model decision boundaries and weakens classification confidence, highlighting the inherent context dependency and temporal continuity of hate speech expression. Our findings provide new insights into the temporal dynamics of multimodal hateful videos and highlight the need for temporally aware models and benchmarks for improved robustness and interpretability. Code and data are available at https://github.com/Multimodal-Intelligence-Lab-MIL/HatefulVideoLabelNoise.
Recent Deep Learning in Crowd Behaviour Analysis: A Brief Review
May 23, 2025Crowd behaviour analysis is essential to numerous real-world applications, such as public safety and urban planning, and therefore has been studied for decades. In the last decade or so, the development of deep learning has significantly propelled the research on crowd behaviours. This chapter reviews recent advances in crowd behaviour analysis using deep learning. We mainly review the research in two core tasks in this field, crowd behaviour prediction and recognition. We broadly cover how different deep neural networks, after first being proposed in machine learning, are applied to analysing crowd behaviours. This includes pure deep neural network models as well as recent development of methodologies combining physics with deep learning. In addition, representative studies are discussed and compared in detail. Finally, we discuss the effectiveness of existing methods and future research directions in this rapidly evolving field. This chapter aims to provide a high-level summary of the ongoing deep learning research in crowd behaviour analysis. It intends to help new researchers who just entered this field to obtain an overall understanding of the ongoing research, as well as to provide a retrospective analysis for existing researchers to identify possible future directions
Learning Extremely High Density Crowds as Active Matters
Mar 15, 2025
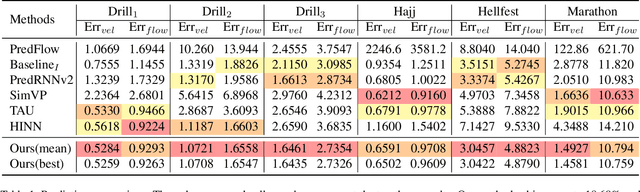
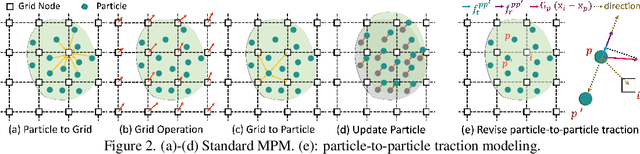

Video-based high-density crowd analysis and prediction has been a long-standing topic in computer vision. It is notoriously difficult due to, but not limited to, the lack of high-quality data and complex crowd dynamics. Consequently, it has been relatively under studied. In this paper, we propose a new approach that aims to learn from in-the-wild videos, often with low quality where it is difficult to track individuals or count heads. The key novelty is a new physics prior to model crowd dynamics. We model high-density crowds as active matter, a continumm with active particles subject to stochastic forces, named 'crowd material'. Our physics model is combined with neural networks, resulting in a neural stochastic differential equation system which can mimic the complex crowd dynamics. Due to the lack of similar research, we adapt a range of existing methods which are close to ours for comparison. Through exhaustive evaluation, we show our model outperforms existing methods in analyzing and forecasting extremely high-density crowds. Furthermore, since our model is a continuous-time physics model, it can be used for simulation and analysis, providing strong interpretability. This is categorically different from most deep learning methods, which are discrete-time models and black-boxes.
3D Student Splatting and Scooping
Mar 13, 2025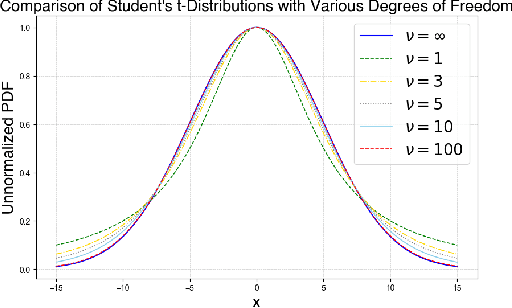
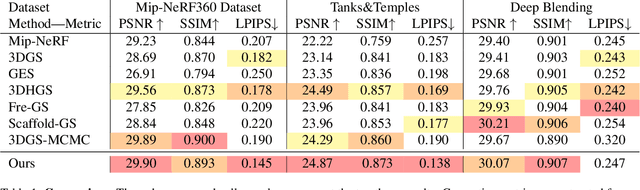
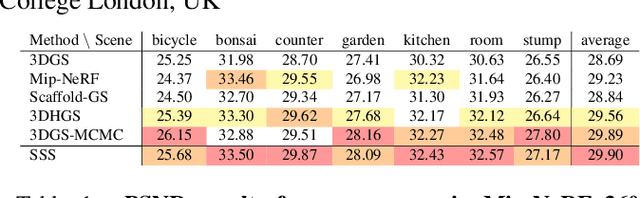
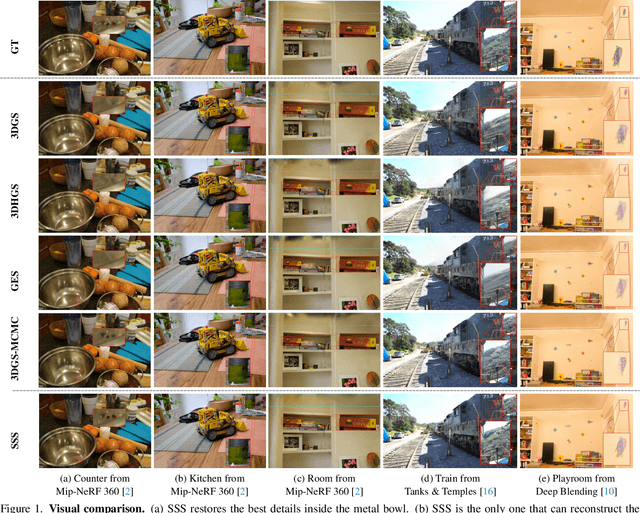
Recently, 3D Gaussian Splatting (3DGS) provides a new framework for novel view synthesis, and has spiked a new wave of research in neural rendering and related applications. As 3DGS is becoming a foundational component of many models, any improvement on 3DGS itself can bring huge benefits. To this end, we aim to improve the fundamental paradigm and formulation of 3DGS. We argue that as an unnormalized mixture model, it needs to be neither Gaussians nor splatting. We subsequently propose a new mixture model consisting of flexible Student's t distributions, with both positive (splatting) and negative (scooping) densities. We name our model Student Splatting and Scooping, or SSS. When providing better expressivity, SSS also poses new challenges in learning. Therefore, we also propose a new principled sampling approach for optimization. Through exhaustive evaluation and comparison, across multiple datasets, settings, and metrics, we demonstrate that SSS outperforms existing methods in terms of quality and parameter efficiency, e.g. achieving matching or better quality with similar numbers of components, and obtaining comparable results while reducing the component number by as much as 82%.
Human Motion Prediction under Unexpected Perturbation
Mar 23, 2024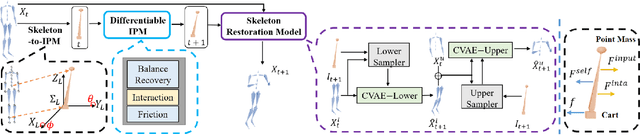
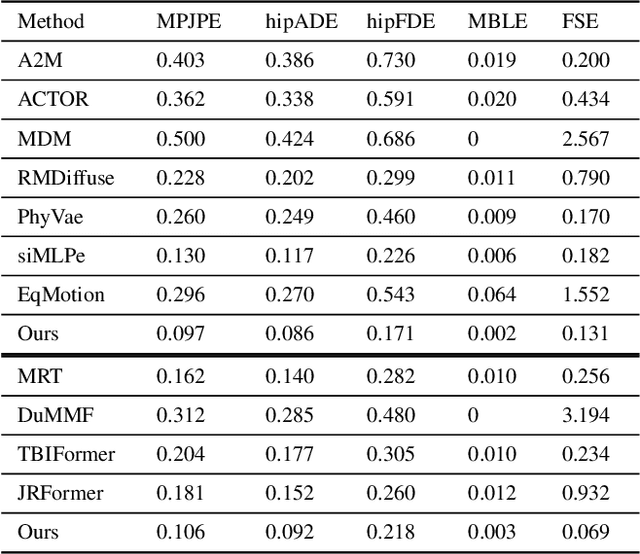
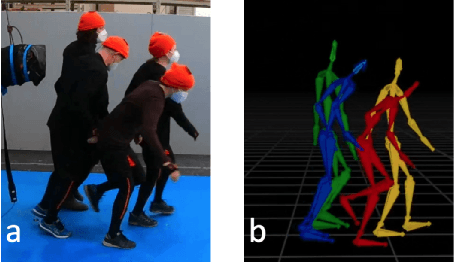
We investigate a new task in human motion prediction, which is predicting motions under unexpected physical perturbation potentially involving multiple people. Compared with existing research, this task involves predicting less controlled, unpremeditated and pure reactive motions in response to external impact and how such motions can propagate through people. It brings new challenges such as data scarcity and predicting complex interactions. To this end, we propose a new method capitalizing differential physics and deep neural networks, leading to an explicit Latent Differential Physics (LDP) model. Through experiments, we demonstrate that LDP has high data efficiency, outstanding prediction accuracy, strong generalizability and good explainability. Since there is no similar research, a comprehensive comparison with 11 adapted baselines from several relevant domains is conducted, showing LDP outperforming existing research both quantitatively and qualitatively, improving prediction accuracy by as much as 70%, and demonstrating significantly stronger generalization.
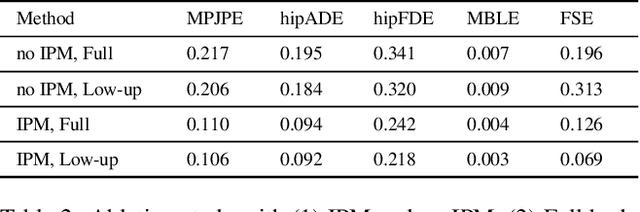
Human Trajectory Forecasting with Explainable Behavioral Uncertainty
Jul 04, 2023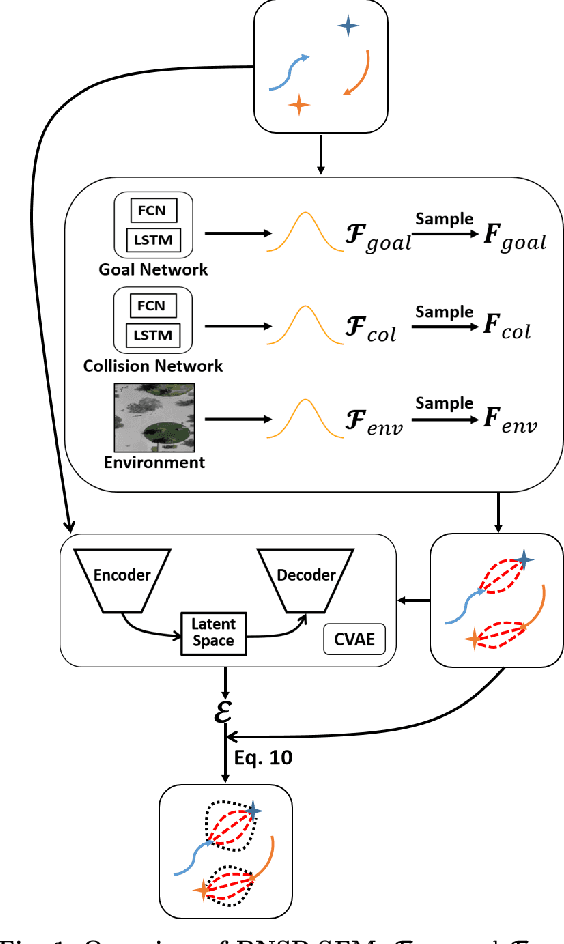
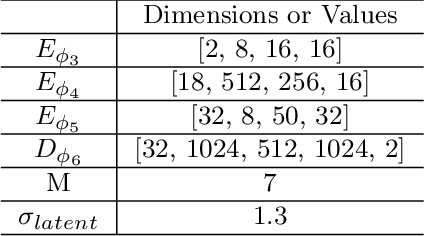

Human trajectory forecasting helps to understand and predict human behaviors, enabling applications from social robots to self-driving cars, and therefore has been heavily investigated. Most existing methods can be divided into model-free and model-based methods. Model-free methods offer superior prediction accuracy but lack explainability, while model-based methods provide explainability but cannot predict well. Combining both methodologies, we propose a new Bayesian Neural Stochastic Differential Equation model BNSP-SFM, where a behavior SDE model is combined with Bayesian neural networks (BNNs). While the NNs provide superior predictive power, the SDE offers strong explainability with quantifiable uncertainty in behavior and observation. We show that BNSP-SFM achieves up to a 50% improvement in prediction accuracy, compared with 11 state-of-the-art methods. BNSP-SFM also generalizes better to drastically different scenes with different environments and crowd densities (~ 20 times higher than the testing data). Finally, BNSP-SFM can provide predictions with confidence to better explain potential causes of behaviors. The code will be released upon acceptance.
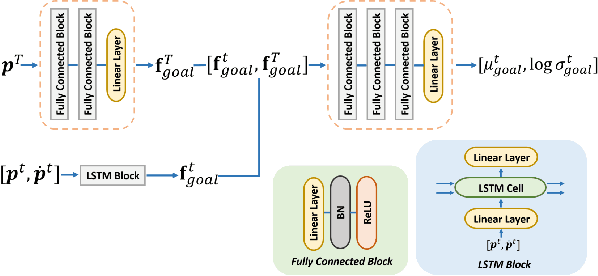
Human Trajectory Prediction via Neural Social Physics
Jul 21, 2022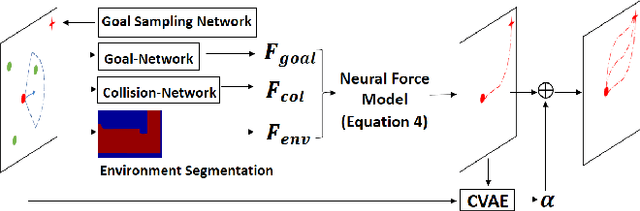
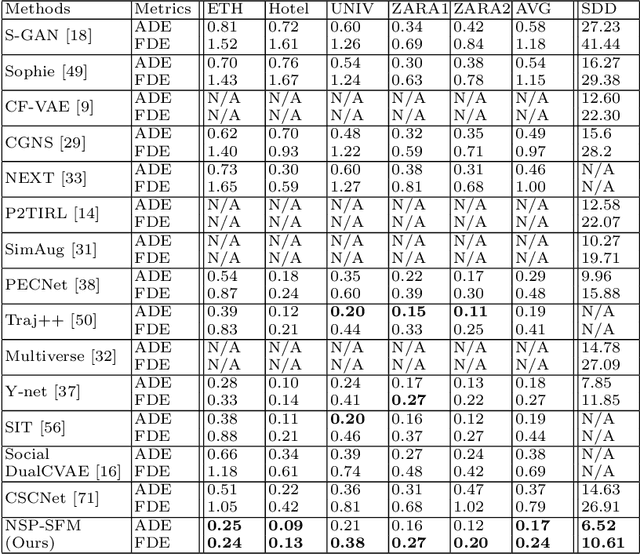


Trajectory prediction has been widely pursued in many fields, and many model-based and model-free methods have been explored. The former include rule-based, geometric or optimization-based models, and the latter are mainly comprised of deep learning approaches. In this paper, we propose a new method combining both methodologies based on a new Neural Differential Equation model. Our new model (Neural Social Physics or NSP) is a deep neural network within which we use an explicit physics model with learnable parameters. The explicit physics model serves as a strong inductive bias in modeling pedestrian behaviors, while the rest of the network provides a strong data-fitting capability in terms of system parameter estimation and dynamics stochasticity modeling. We compare NSP with 15 recent deep learning methods on 6 datasets and improve the state-of-the-art performance by 5.56%-70%. Besides, we show that NSP has better generalizability in predicting plausible trajectories in drastically different scenarios where the density is 2-5 times as high as the testing data. Finally, we show that the physics model in NSP can provide plausible explanations for pedestrian behaviors, as opposed to black-box deep learning. Code is available: https://github.com/realcrane/Human-Trajectory-Prediction-via-Neural-Social-Physics.