 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgexbench: Tracking Agents Productivity Scaling with Profession-Aligned Real-World Evaluations
Jun 16, 2025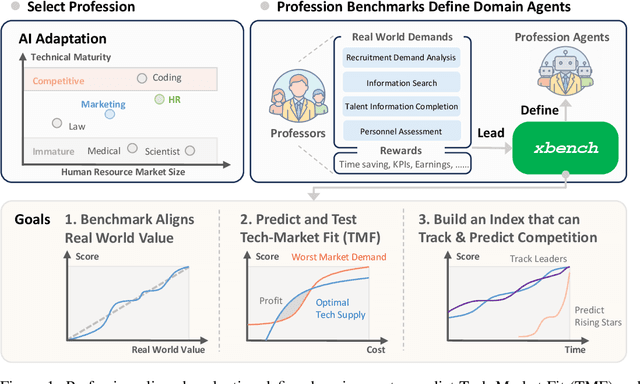
We introduce xbench, a dynamic, profession-aligned evaluation suite designed to bridge the gap between AI agent capabilities and real-world productivity. While existing benchmarks often focus on isolated technical skills, they may not accurately reflect the economic value agents deliver in professional settings. To address this, xbench targets commercially significant domains with evaluation tasks defined by industry professionals. Our framework creates metrics that strongly correlate with productivity value, enables prediction of Technology-Market Fit (TMF), and facilitates tracking of product capabilities over time. As our initial implementations, we present two benchmarks: Recruitment and Marketing. For Recruitment, we collect 50 tasks from real-world headhunting business scenarios to evaluate agents' abilities in company mapping, information retrieval, and talent sourcing. For Marketing, we assess agents' ability to match influencers with advertiser needs, evaluating their performance across 50 advertiser requirements using a curated pool of 836 candidate influencers. We present initial evaluation results for leading contemporary agents, establishing a baseline for these professional domains. Our continuously updated evalsets and evaluations are available at https://xbench.org.
LF-GNSS: Towards More Robust Satellite Positioning with a Hard Example Mining Enhanced Learning-Filtering Deep Fusion Framework
May 26, 2025Global Navigation Satellite System (GNSS) is essential for autonomous driving systems, unmanned vehicles, and various location-based technologies, as it provides the precise geospatial information necessary for navigation and situational awareness. However, its performance is often degraded by Non-Line-Of-Sight (NLOS) and multipath effects, especially in urban environments. Recently, Artificial Intelligence (AI) has been driving innovation across numerous industries, introducing novel solutions to mitigate the challenges in satellite positioning. This paper presents a learning-filtering deep fusion framework for satellite positioning, termed LF-GNSS. The framework utilizes deep learning networks to intelligently analyze the signal characteristics of satellite observations, enabling the adaptive construction of observation noise covariance matrices and compensated innovation vectors for Kalman filter input. A dynamic hard example mining technique is incorporated to enhance model robustness by prioritizing challenging satellite signals during training. Additionally, we introduce a novel feature representation based on Dilution of Precision (DOP) contributions, which helps to more effectively characterize the signal quality of individual satellites and improve measurement weighting. LF-GNSS has been validated on both public and private datasets, demonstrating superior positioning accuracy compared to traditional methods and other learning-based solutions. To encourage further integration of AI and GNSS research, we will open-source the code at https://github.com/GarlanLou/LF-GNSS, and release a collection of satellite positioning datasets for urban scenarios at https://github.com/GarlanLou/LF-GNSS-Dataset.
Exploring Intrinsic Normal Prototypes within a Single Image for Universal Anomaly Detection
Mar 04, 2025Anomaly detection (AD) is essential for industrial inspection, yet existing methods typically rely on ``comparing'' test images to normal references from a training set. However, variations in appearance and positioning often complicate the alignment of these references with the test image, limiting detection accuracy. We observe that most anomalies manifest as local variations, meaning that even within anomalous images, valuable normal information remains. We argue that this information is useful and may be more aligned with the anomalies since both the anomalies and the normal information originate from the same image. Therefore, rather than relying on external normality from the training set, we propose INP-Former, a novel method that extracts Intrinsic Normal Prototypes (INPs) directly from the test image. Specifically, we introduce the INP Extractor, which linearly combines normal tokens to represent INPs. We further propose an INP Coherence Loss to ensure INPs can faithfully represent normality for the testing image. These INPs then guide the INP-Guided Decoder to reconstruct only normal tokens, with reconstruction errors serving as anomaly scores. Additionally, we propose a Soft Mining Loss to prioritize hard-to-optimize samples during training. INP-Former achieves state-of-the-art performance in single-class, multi-class, and few-shot AD tasks across MVTec-AD, VisA, and Real-IAD, positioning it as a versatile and universal solution for AD. Remarkably, INP-Former also demonstrates some zero-shot AD capability. Code is available at:https://github.com/luow23/INP-Former.
FE-GUT: Factor Graph Optimization hybrid with Extended Kalman Filter for tightly coupled GNSS/UWB Integration
Jul 09, 2024Precise positioning and navigation information has been increasingly important with the development of the consumer electronics market. Due to some deficits of Global Navigation Satellite System (GNSS), such as susceptible to interferences, integrating of GNSS with additional alternative sensors is a promising approach to overcome the performance limitations of GNSS-based localization systems. Ultra-Wideband (UWB) can be used to enhance GNSS in constructing an integrated localization system. However, most low-cost UWB devices lack a hardware-level time synchronization feature, which necessitates the estimation and compensation of the time-offset in the tightly coupled GNSS/UWB integration. Given the flexibility of probabilistic graphical models, the time-offset can be modeled as an invariant constant in the discretization of the continuous model. This work proposes a novel architecture in which Factor Graph Optimization (FGO) is hybrid with Extend Kalman Filter (EKF) for tightly coupled GNSS/UWB integration with online Temporal calibration (FE-GUT). FGO is utilized to precisely estimate the time-offset, while EKF provides initailization for the new factors and performs time-offset compensation. Simulation-based experiments validate the integrated localization performance of FE-GUT. In a four-wheeled robot scenario, the results demonstrate that, compared to EKF, FE-GUT can improve horizontal and vertical localization accuracy by 58.59\% and 34.80\%, respectively, while the time-offset estimation accuracy is improved by 76.80\%. All the source codes and datasets can be gotten via https://github.com/zhaoqj23/FE-GUT/.