 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Resource Crop Classification from Multi-Spectral Time Series Using Lossless Compressors
May 28, 2024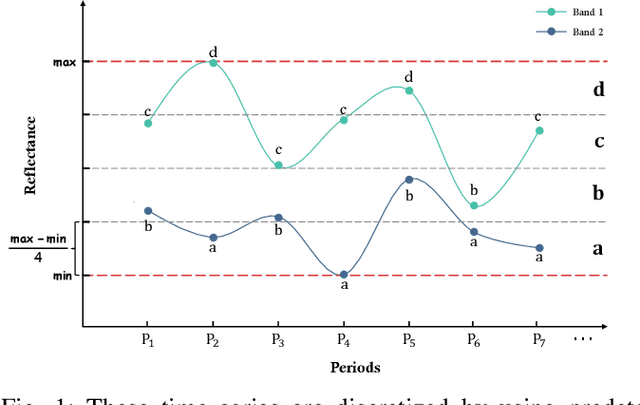
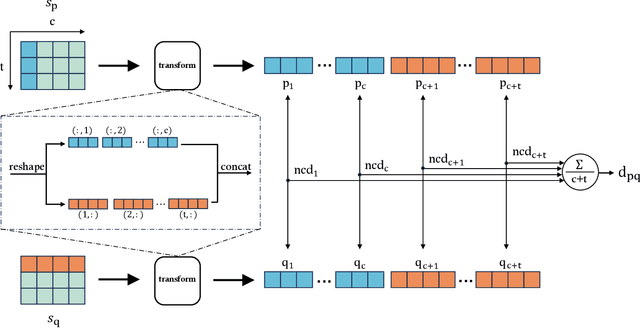
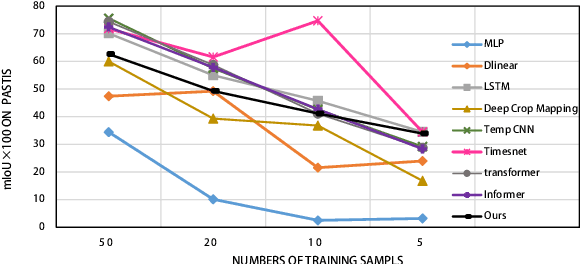
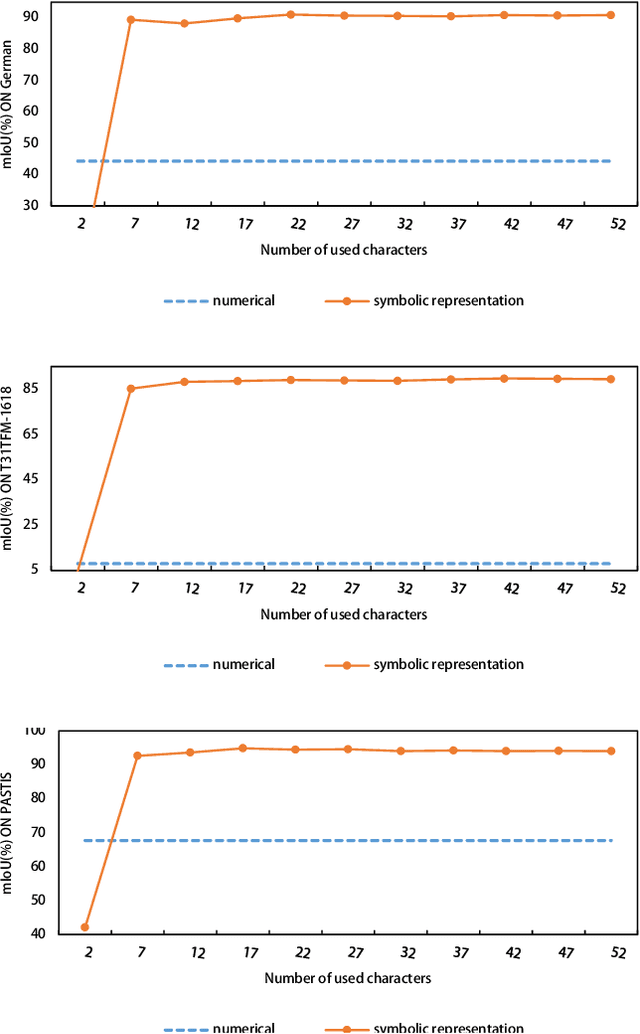
Deep learning has significantly improved the accuracy of crop classification using multispectral temporal data. However, these models have complex structures with numerous parameters, requiring large amounts of data and costly training. In low-resource situations with fewer labeled samples, deep learning models perform poorly due to insufficient data. Conversely, compressors are data-type agnostic, and non-parametric methods do not bring underlying assumptions. Inspired by this insight, we propose a non-training alternative to deep learning models, aiming to address these situations. Specifically, the Symbolic Representation Module is proposed to convert the reflectivity into symbolic representations. The symbolic representations are then cross-transformed in both the channel and time dimensions to generate symbolic embeddings. Next, the Multi-scale Normalised Compression Distance (MNCD) is designed to measure the correlation between any two symbolic embeddings. Finally, based on the MNCDs, high quality crop classification can be achieved using only a k-nearest-neighbor classifier kNN. The entire framework is ready-to-use and lightweight. Without any training, it outperformed, on average, 7 advanced deep learning models trained at scale on three benchmark datasets. It also outperforms more than half of these models in the few-shot setting with sparse crop labels. Therefore, the high performance and robustness of our non-training framework makes it truly applicable to real-world crop mapping. Codes are available at: https://github.com/qinfengsama/Compressor-Based-Crop-Mapping.
Point wise or Feature wise? Benchmark Comparison of Public Available LiDAR Odometry Algorithms in Urban Canyons
Apr 12, 2021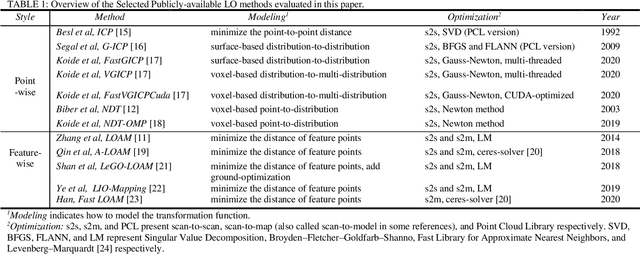
Robust and precise localization is essential for the autonomous system with navigation requirements. Light detection and ranging (LiDAR) odometry is extensively studied in the past decades to achieve this goal. Satisfactory accuracy can be achieved in scenarios with abundant environmental features using existing LiDAR odometry (LO) algorithms. Unfortunately, the performance of the LiDAR odometry is significantly degraded in urban canyons with numerous dynamic objects and complex environmental structures. Meanwhile, it is still not clear from the existing literature which LO algorithms perform well in such challenging environments. To fill this gap, this paper evaluates an array of popular and extensively studied LO pipelines using the datasets collected in urban canyons of Hong Kong. We present the results in terms of their positioning accuracy and computational efficiency. Three major factors dominating the performance of LO in urban canyons are concluded, including the ego-vehicle dynamic, moving objects, and degree of urbanization. According to our experiment results, point-wise achieves better accuracy in urban canyons while feature-wise achieves cost-efficiency and satisfactory positioning accuracy.