 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Learning-based Fleet Scheduling for Urban Air Mobility under Operational Constraints, Varying Demand & Uncertainties
Jan 09, 2024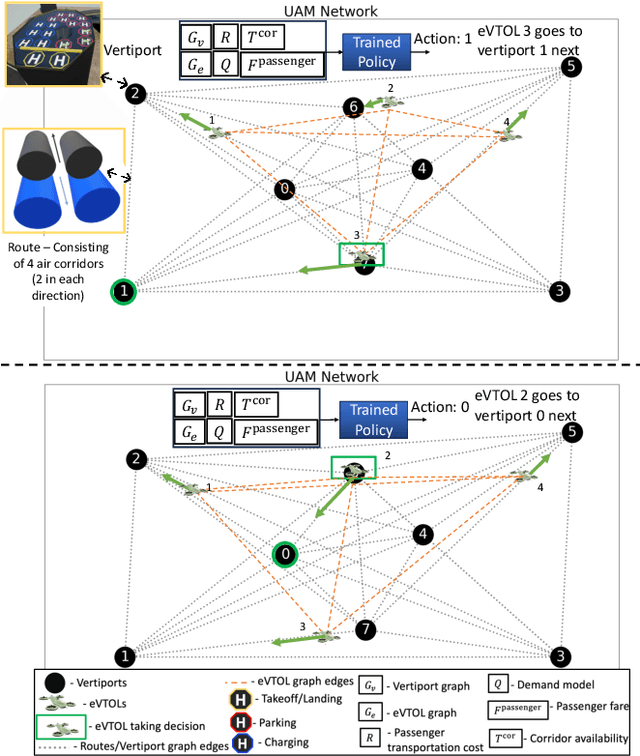
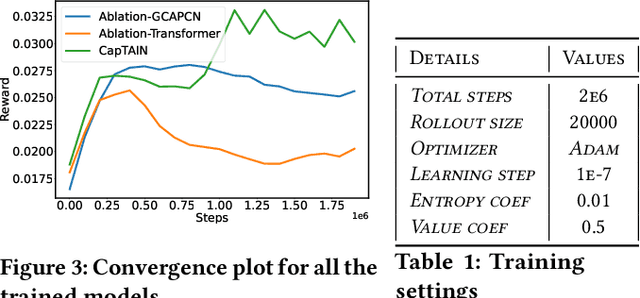
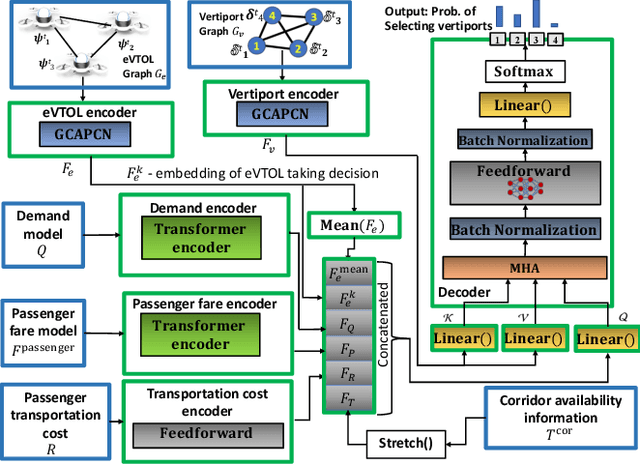

This paper develops a graph reinforcement learning approach to online planning of the schedule and destinations of electric aircraft that comprise an urban air mobility (UAM) fleet operating across multiple vertiports. This fleet scheduling problem is formulated to consider time-varying demand, constraints related to vertiport capacity, aircraft capacity and airspace safety guidelines, uncertainties related to take-off delay, weather-induced route closures, and unanticipated aircraft downtime. Collectively, such a formulation presents greater complexity, and potentially increased realism, than in existing UAM fleet planning implementations. To address these complexities, a new policy architecture is constructed, primary components of which include: graph capsule conv-nets for encoding vertiport and aircraft-fleet states both abstracted as graphs; transformer layers encoding time series information on demand and passenger fare; and a Multi-head Attention-based decoder that uses the encoded information to compute the probability of selecting each available destination for an aircraft. Trained with Proximal Policy Optimization, this policy architecture shows significantly better performance in terms of daily averaged profits on unseen test scenarios involving 8 vertiports and 40 aircraft, when compared to a random baseline and genetic algorithm-derived optimal solutions, while being nearly 1000 times faster in execution than the latter.
Fast Decision Support for Air Traffic Management at Urban Air Mobility Vertiports using Graph Learning
Aug 17, 2023



Urban Air Mobility (UAM) promises a new dimension to decongested, safe, and fast travel in urban and suburban hubs. These UAM aircraft are conceived to operate from small airports called vertiports each comprising multiple take-off/landing and battery-recharging spots. Since they might be situated in dense urban areas and need to handle many aircraft landings and take-offs each hour, managing this schedule in real-time becomes challenging for a traditional air-traffic controller but instead calls for an automated solution. This paper provides a novel approach to this problem of Urban Air Mobility - Vertiport Schedule Management (UAM-VSM), which leverages graph reinforcement learning to generate decision-support policies. Here the designated physical spots within the vertiport's airspace and the vehicles being managed are represented as two separate graphs, with feature extraction performed through a graph convolutional network (GCN). Extracted features are passed onto perceptron layers to decide actions such as continue to hover or cruise, continue idling or take-off, or land on an allocated vertiport spot. Performance is measured based on delays, safety (no. of collisions) and battery consumption. Through realistic simulations in AirSim applied to scaled down multi-rotor vehicles, our results demonstrate the suitability of using graph reinforcement learning to solve the UAM-VSM problem and its superiority to basic reinforcement learning (with graph embeddings) or random choice baselines.
Efficient Concurrent Design of the Morphology of Unmanned Aerial Systems and their Collective-Search Behavior
Sep 26, 2022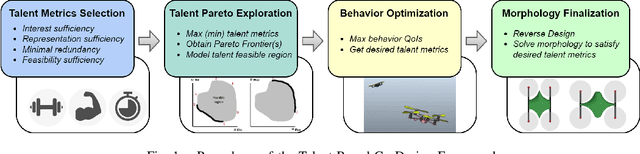
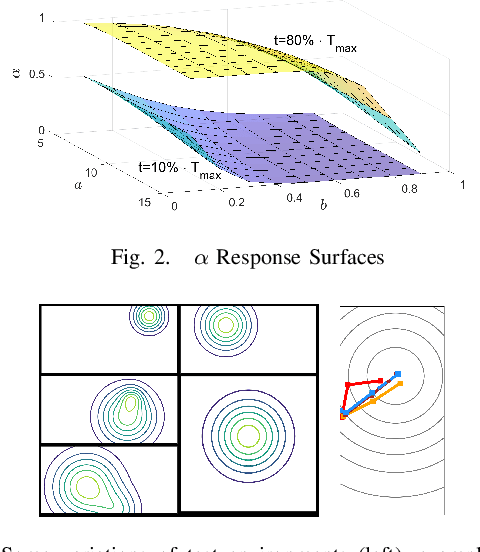
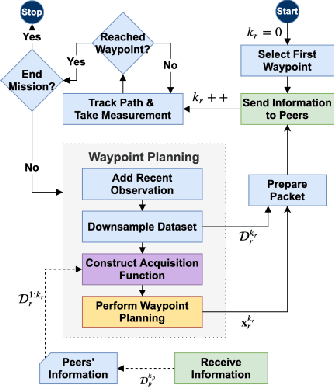
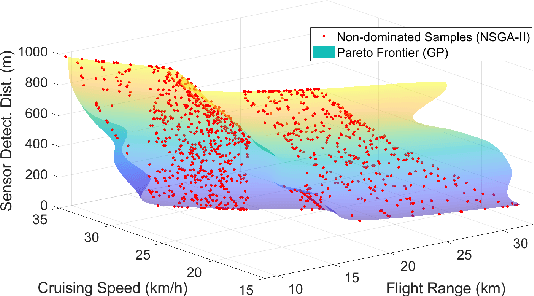
The collective operation of robots, such as unmanned aerial vehicles (UAVs) operating as a team or swarm, is affected by their individual capabilities, which in turn is dependent on their physical design, aka morphology. However, with the exception of a few (albeit ad hoc) evolutionary robotics methods, there has been very little work on understanding the interplay of morphology and collective behavior. There is especially a lack of computational frameworks to concurrently search for the robot morphology and the hyper-parameters of their behavior model that jointly optimize the collective (team) performance. To address this gap, this paper proposes a new co-design framework. Here the exploding computational cost of an otherwise nested morphology/behavior co-design is effectively alleviated through the novel concept of ``talent" metrics; while also allowing significantly better solutions compared to the typically sub-optimal sequential morphology$\to$behavior design approach. This framework comprises four major steps: talent metrics selection, talent Pareto exploration (a multi-objective morphology optimization process), behavior optimization, and morphology finalization. This co-design concept is demonstrated by applying it to design UAVs that operate as a team to localize signal sources, e.g., in victim search and hazard localization. Here, the collective behavior is driven by a recently reported batch Bayesian search algorithm called Bayes-Swarm. Our case studies show that the outcome of co-design provides significantly higher success rates in signal source localization compared to a baseline design, across a variety of signal environments and teams with 6 to 15 UAVs. Moreover, this co-design process provides two orders of magnitude reduction in computing time compared to a projected nested design approach.