 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEscapeWildFire: Assisting People to Escape Wildfires in Real-Time
Feb 23, 2021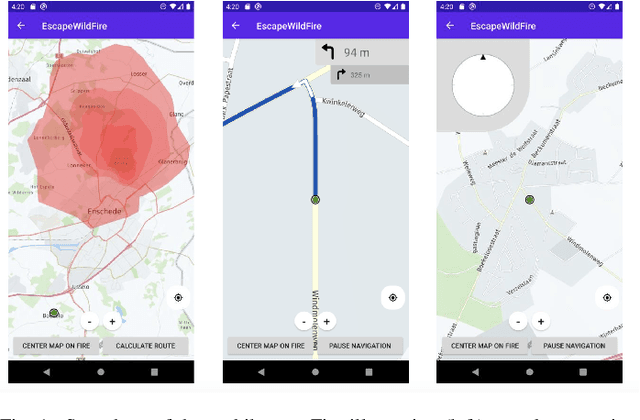
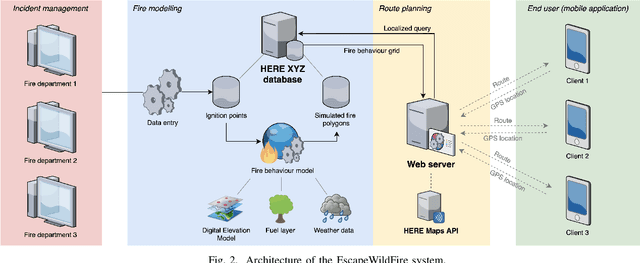
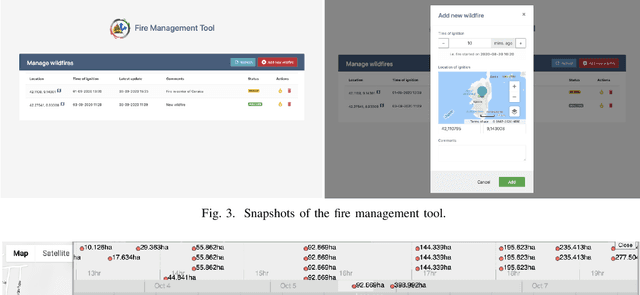
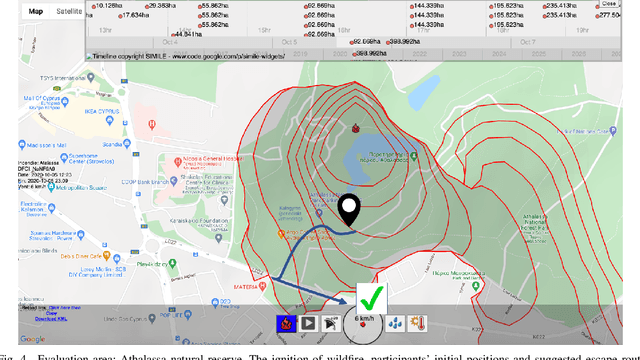
Over the past couple of decades, the number of wildfires and area of land burned around the world has been steadily increasing, partly due to climatic changes and global warming. Therefore, there is a high probability that more people will be exposed to and endangered by forest fires. Hence there is an urgent need to design pervasive systems that effectively assist people and guide them to safety during wildfires. This paper presents EscapeWildFire, a mobile application connected to a backend system which models and predicts wildfire geographical progression, assisting citizens to escape wildfires in real-time. A small pilot indicates the correctness of the system. The code is open-source; fire authorities around the world are encouraged to adopt this approach.
This Looks Like That, Because ... Explaining Prototypes for Interpretable Image Recognition
Nov 05, 2020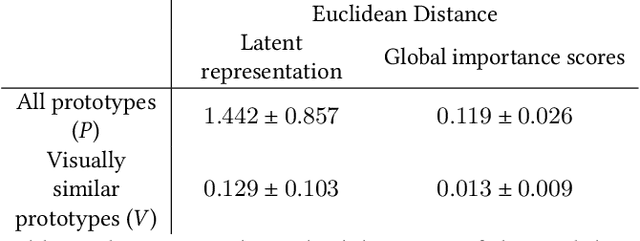
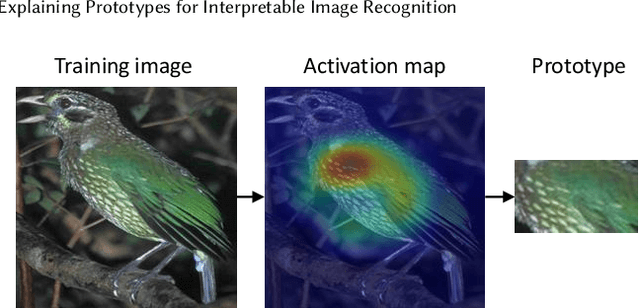

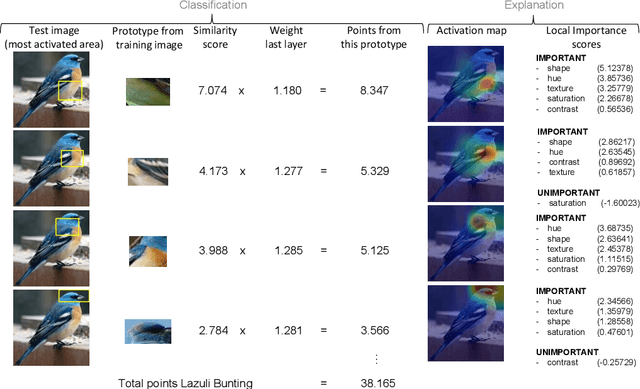
Image recognition with prototypes is considered an interpretable alternative for black box deep learning models. Classification depends on the extent to which a test image "looks like" a prototype. However, perceptual similarity for humans can be different from the similarity learnt by the model. A user is unaware of the underlying classification strategy and does not know which image characteristics (e.g., color or shape) is the dominant characteristic for the decision. We address this ambiguity and argue that prototypes should be explained. Only visualizing prototypes can be insufficient for understanding what a prototype exactly represents, and why a prototype and an image are considered similar. We improve interpretability by automatically enhancing prototypes with extra information about visual characteristics considered important by the model. Specifically, our method quantifies the influence of color hue, shape, texture, contrast and saturation in a prototype. We apply our method to the existing Prototypical Part Network (ProtoPNet) and show that our explanations clarify the meaning of a prototype which might have been interpreted incorrectly otherwise. We also reveal that visually similar prototypes can have the same explanations, indicating redundancy. Because of the generality of our approach, it can improve the interpretability of any similarity-based method for prototypical image recognition.
Short Term Prediction of Parking Area states Using Real Time Data and Machine Learning Techniques
Nov 29, 2019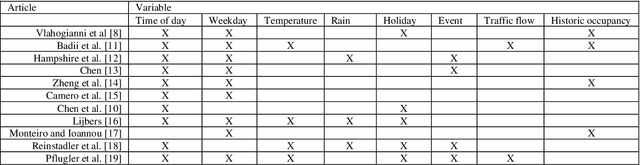

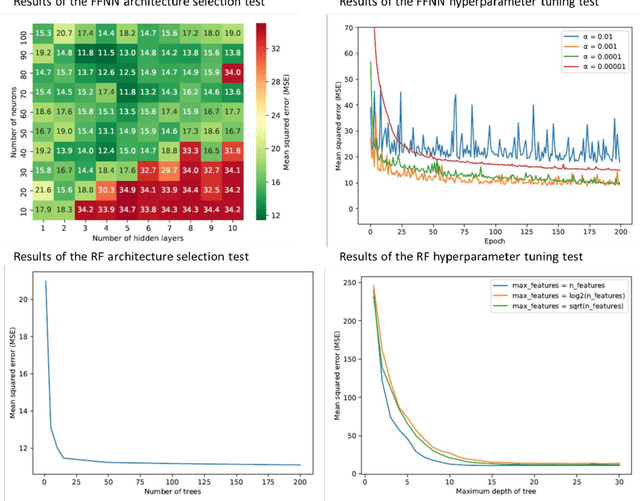

Public road authorities and private mobility service providers need information derived from the current and predicted traffic states to act upon the daily urban system and its spatial and temporal dynamics. In this research, a real-time parking area state (occupancy, in- and outflux) prediction model (up to 60 minutes ahead) has been developed using publicly available historic and real time data sources. Based on a case study in a real-life scenario in the city of Arnhem, a Neural Network-based approach outperforms a Random Forest-based one on all assessed performance measures, although the differences are small. Both are outperforming a naive seasonal random walk model. Although the performance degrades with increasing prediction horizon, the model shows a performance gain of over 150% at a prediction horizon of 60 minutes compared with the naive model. Furthermore, it is shown that predicting the in- and outflux is a far more difficult task (i.e. performance gains of 30%) which needs more training data, not based exclusively on occupancy rate. However, the performance of predicting in- and outflux is less sensitive to the prediction horizon. In addition, it is shown that real-time information of current occupancy rate is the independent variable with the highest contribution to the performance, although time, traffic flow and weather variables also deliver a significant contribution. During real-time deployment, the model performs three times better than the naive model on average. As a result, it can provide valuable information for proactive traffic management as well as mobility service providers.