 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShort Term Prediction of Parking Area states Using Real Time Data and Machine Learning Techniques
Paper and Code
Nov 29, 2019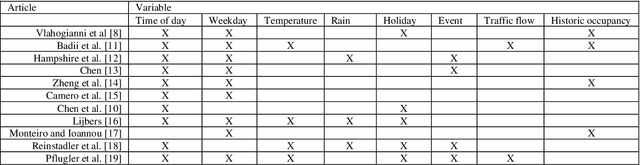

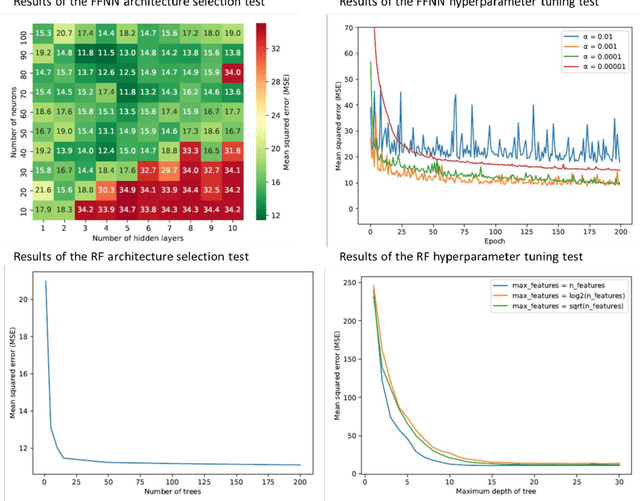

Public road authorities and private mobility service providers need information derived from the current and predicted traffic states to act upon the daily urban system and its spatial and temporal dynamics. In this research, a real-time parking area state (occupancy, in- and outflux) prediction model (up to 60 minutes ahead) has been developed using publicly available historic and real time data sources. Based on a case study in a real-life scenario in the city of Arnhem, a Neural Network-based approach outperforms a Random Forest-based one on all assessed performance measures, although the differences are small. Both are outperforming a naive seasonal random walk model. Although the performance degrades with increasing prediction horizon, the model shows a performance gain of over 150% at a prediction horizon of 60 minutes compared with the naive model. Furthermore, it is shown that predicting the in- and outflux is a far more difficult task (i.e. performance gains of 30%) which needs more training data, not based exclusively on occupancy rate. However, the performance of predicting in- and outflux is less sensitive to the prediction horizon. In addition, it is shown that real-time information of current occupancy rate is the independent variable with the highest contribution to the performance, although time, traffic flow and weather variables also deliver a significant contribution. During real-time deployment, the model performs three times better than the naive model on average. As a result, it can provide valuable information for proactive traffic management as well as mobility service providers.