 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRISMA: A Novel Approach for Deriving Probabilistic Surrogate Safety Measures for Risk Evaluation
Mar 14, 2023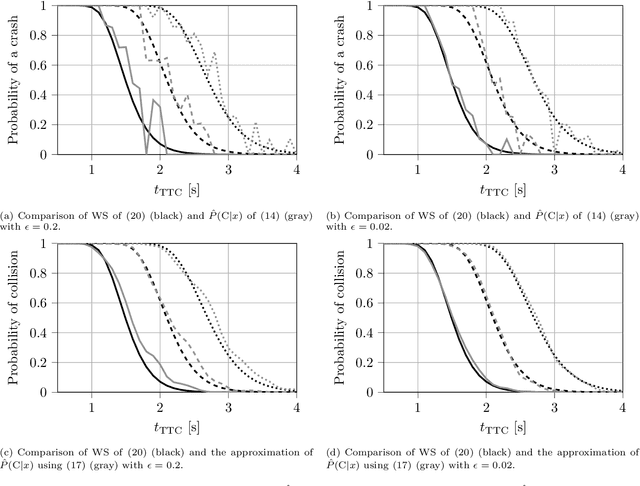
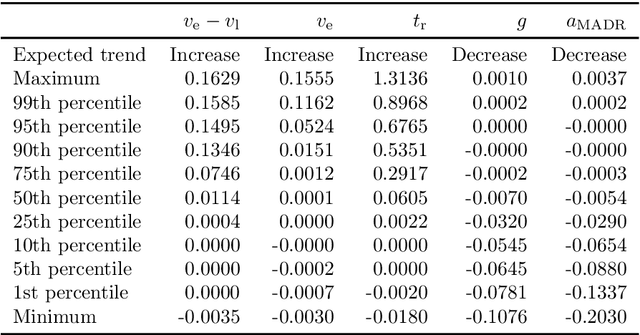
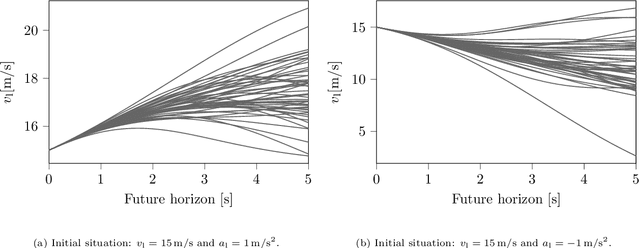
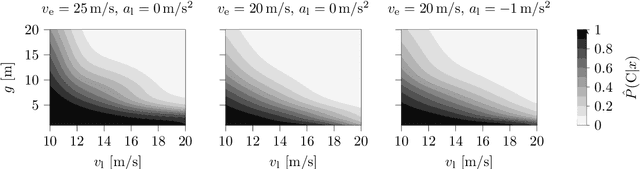
Surrogate Safety Measures (SSMs) are used to express road safety in terms of the safety risk in traffic conflicts. Typically, SSMs rely on assumptions regarding the future evolution of traffic participant trajectories to generate a measure of risk. As a result, they are only applicable in scenarios where those assumptions hold. To address this issue, we present a novel data-driven Probabilistic RISk Measure derivAtion (PRISMA) method. The PRISMA method is used to derive SSMs that can be used to calculate in real time the probability of a specific event (e.g., a crash). Because we adopt a data-driven approach to predict the possible future evolutions of traffic participant trajectories, less assumptions on these trajectories are needed. Since the PRISMA is not bound to specific assumptions, multiple SSMs for different types of scenarios can be derived. To calculate the probability of the specific event, the PRISMA method uses Monte Carlo simulations to estimate the occurrence probability of the specified event. We further introduce a statistical method that requires fewer simulations to estimate this probability. Combined with a regression model, this enables our derived SSMs to make real-time risk estimations. To illustrate the PRISMA method, an SSM is derived for risk evaluation during longitudinal traffic interactions. It is very difficult, if not impossible, to objectively compare the relative merits of two SSMs. Instead, we provide a method for benchmarking our derived SSM with respect to expected risk trends. The application of the benchmarking illustrates that the SSM matches the expected risk trends. Whereas the derived SSM shows the potential of the PRISMA method, future work involves applying the approach for other types of traffic conflicts, such as lateral traffic conflicts or interactions with vulnerable road users.
Real-World Scenario Mining for the Assessment of Automated Vehicles
May 31, 2020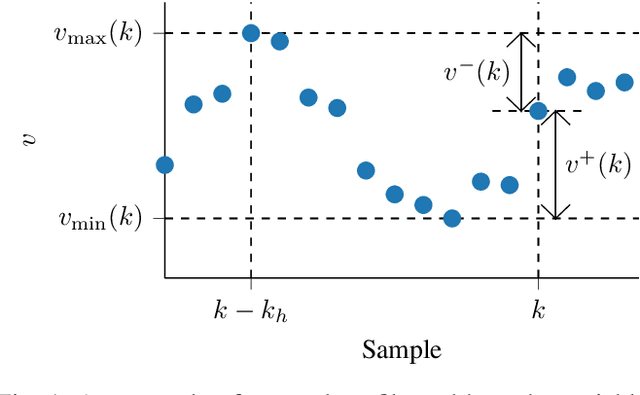
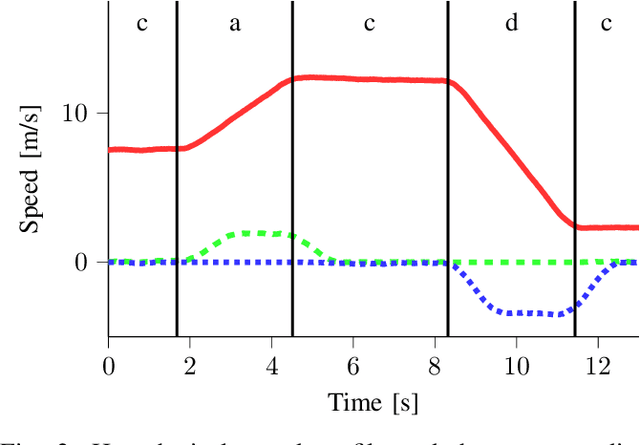
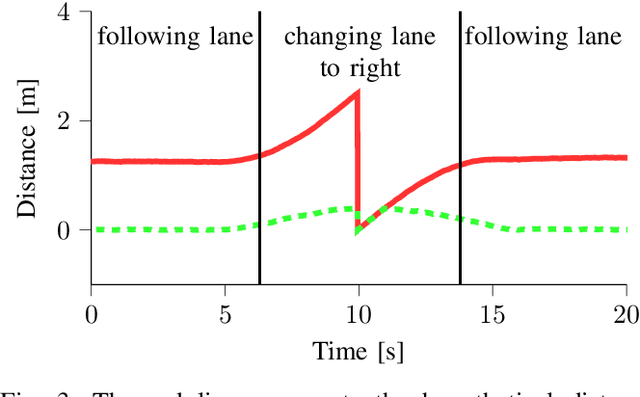
Scenario-based methods for the assessment of Automated Vehicles (AVs) are widely supported by many players in the automotive field. Scenarios captured from real-world data can be used to define the scenarios for the assessment and to estimate their relevance. Therefore, different techniques are proposed for capturing scenarios from real-world data. In this paper, we propose a new method to capture scenarios from real-world data using a two-step approach. The first step consists in automatically labeling the data with tags. Second, we mine the scenarios, represented by a combination of tags, based on the labeled tags. One of the benefits of our approach is that the tags can be used to identify characteristics of a scenario that are shared among different type of scenarios. In this way, these characteristics need to be identified only once. Furthermore, the method is not specific for one type of scenario and, therefore, it can be applied to a large variety of scenarios. We provide two examples to illustrate the method. This paper is concluded with some promising future possibilities for our approach, such as automatic generation of scenarios for the assessment of automated vehicles.
Simple Domain Adaptation with Class Prediction Uncertainty Alignment
Apr 12, 2018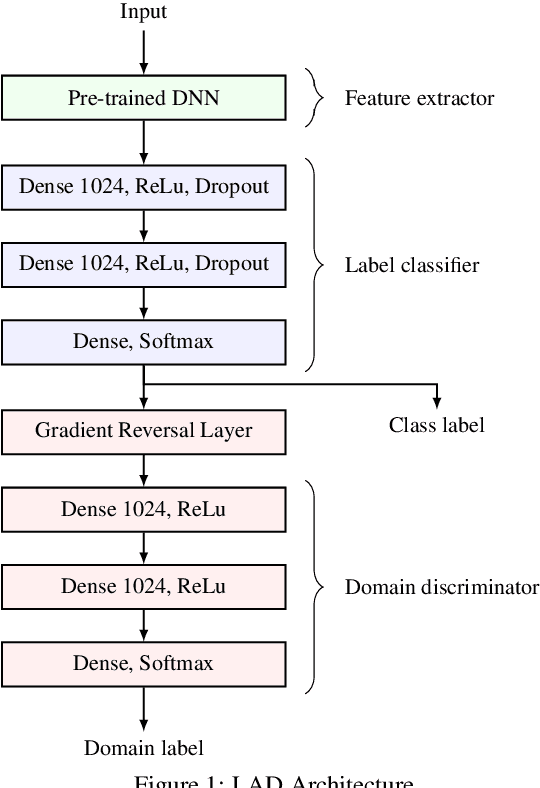
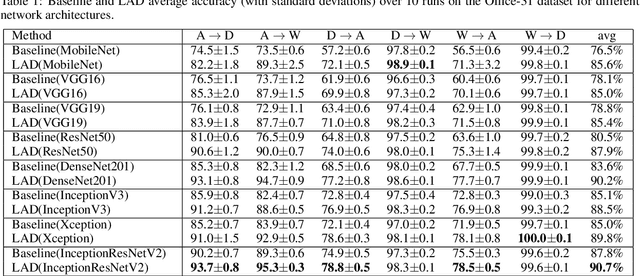
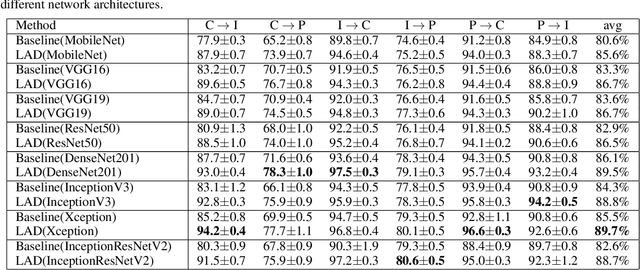
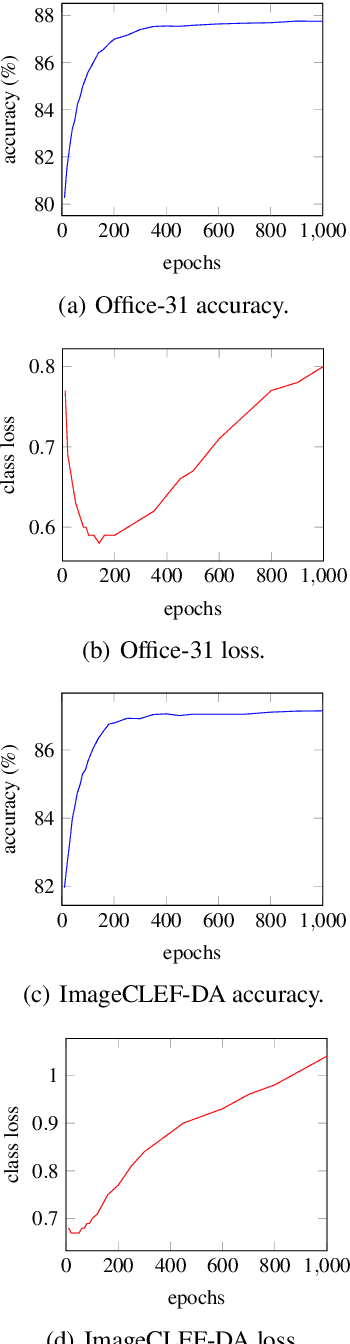
Unsupervised domain adaptation tries to adapt a classifier trained on a labeled source domain to a related but unlabeled target domain. Methods based on adversarial learning try to learn a representation that is at the same time discriminative for the labels yet incapable of discriminating the domains. We propose a very simple and efficient method based on this approach which only aligns predicted class probabilities across domains. Experiments show that this strikingly simple adversarial domain adaptation method is robust to overfitting and achieves state-of-the-art results on datasets for image classification.