 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Control of a Pneumatic Soft Robotic Catheter Using Neural Koopman Operators
Mar 04, 2026Catheter-based interventions are widely used for the diagnosis and treatment of cardiac diseases. Recently, robotic catheters have attracted attention for their ability to improve precision and stability over conventional manual approaches. However, accurate modeling and control of soft robotic catheters remain challenging due to their complex, nonlinear behavior. The Koopman operator enables lifting the original system data into a linear "lifted space", offering a data-driven framework for predictive control; however, manually chosen basis functions in the lifted space often oversimplify system behaviors and degrade control performance. To address this, we propose a neural network-enhanced Koopman operator framework that jointly learns the lifted space representation and Koopman operator in an end-to-end manner. Moreover, motivated by the need to minimize radiation exposure during X-ray fluoroscopy in cardiac ablation, we investigate open-loop control strategies using neural Koopman operators to reliably reach target poses without continuous imaging feedback. The proposed method is validated in two experimental scenarios: interactive position control and a simulated cardiac ablation task using an atrium-like cavity. Our approach achieves average errors of 2.1 +- 0.4 mm in position and 4.9 +- 0.6 degrees in orientation, outperforming not only model-based baselines but also other Koopman variants in targeting accuracy and efficiency. These results highlight the potential of the proposed framework for advancing soft robotic catheter systems and improving catheter-based interventions.
Autonomous Soft Robotic Guidewire Navigation via Imitation Learning
Oct 10, 2025In endovascular surgery, endovascular interventionists push a thin tube called a catheter, guided by a thin wire to a treatment site inside the patient's blood vessels to treat various conditions such as blood clots, aneurysms, and malformations. Guidewires with robotic tips can enhance maneuverability, but they present challenges in modeling and control. Automation of soft robotic guidewire navigation has the potential to overcome these challenges, increasing the precision and safety of endovascular navigation. In other surgical domains, end-to-end imitation learning has shown promising results. Thus, we develop a transformer-based imitation learning framework with goal conditioning, relative action outputs, and automatic contrast dye injections to enable generalizable soft robotic guidewire navigation in an aneurysm targeting task. We train the model on 36 different modular bifurcated geometries, generating 647 total demonstrations under simulated fluoroscopy, and evaluate it on three previously unseen vascular geometries. The model can autonomously drive the tip of the robot to the aneurysm location with a success rate of 83% on the unseen geometries, outperforming several baselines. In addition, we present ablation and baseline studies to evaluate the effectiveness of each design and data collection choice. Project website: https://softrobotnavigation.github.io/
Identifying patterns of proprioception and target matching acuity in healthy humans
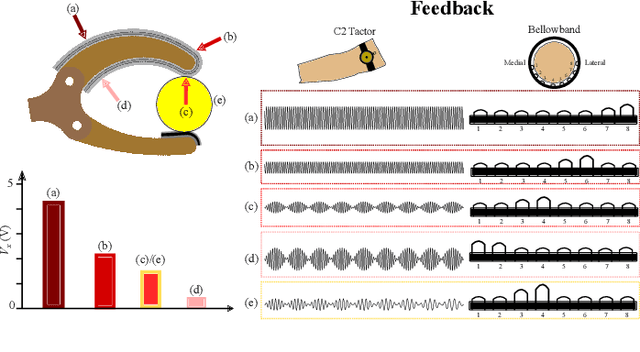
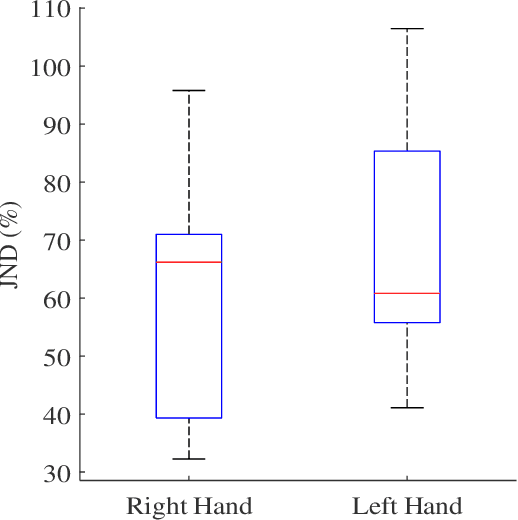
Nov 19, 2024Traditional approaches to measurement in upper-limb therapy have gaps that electronic sensing and recording can help fill. We highlight shortcomings in current kinematic recording devices, and we introduce a wrist sensing device that performs multimodal sensing during single-axis rotation. Our goal is to characterize normative kinesthetic perception and real-world performance as a multimodal sensory "fingerprint" that can serve as a reference point for identifying deficit in persons affected by stroke, and then as a jumping point for later neuroscientific interrogation. We present an experiment involving psychophysical measurements of passive stimuli discrimination, matching adjustment acuity, and ADL performance in 11 neurologically-intact persons. We found that passive velocity sense and active position sense of healthy controls, measured by velocity discrimination and position matching respectively, correlated in rank with each other, but other score comparisons of acuity or task performance had no statistically significant correlations. We also found that participants differed in acuity between passive and active velocity sense, which supports current understanding about muscle spindle activation being modulated by conscious motor command. The potential for our null correlation results to reveal dissociable aspects of deficit is discussed, as well as implications for future neuroscientific study with more kinematic measures and larger datasets.
Dual-Modality Haptic Feedback Improves Dexterous Task Execution with Virtual EMG-Controlled Gripper
Sep 30, 2022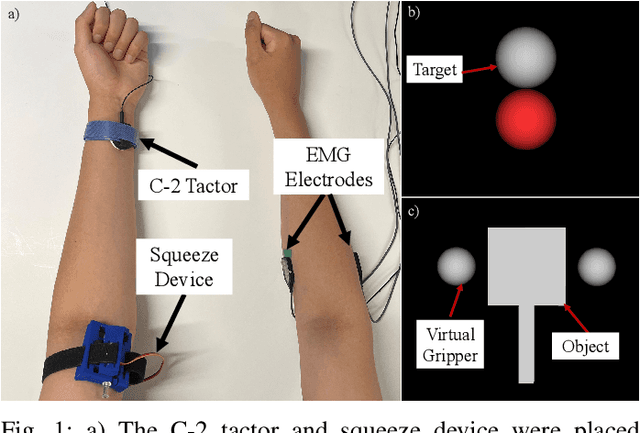
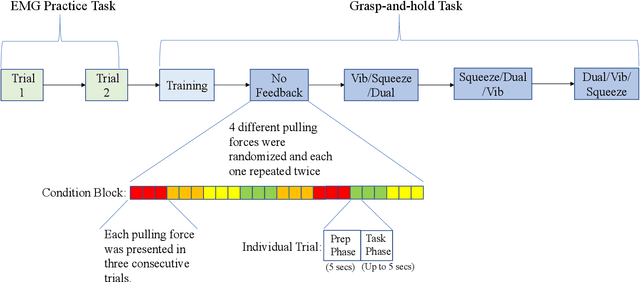
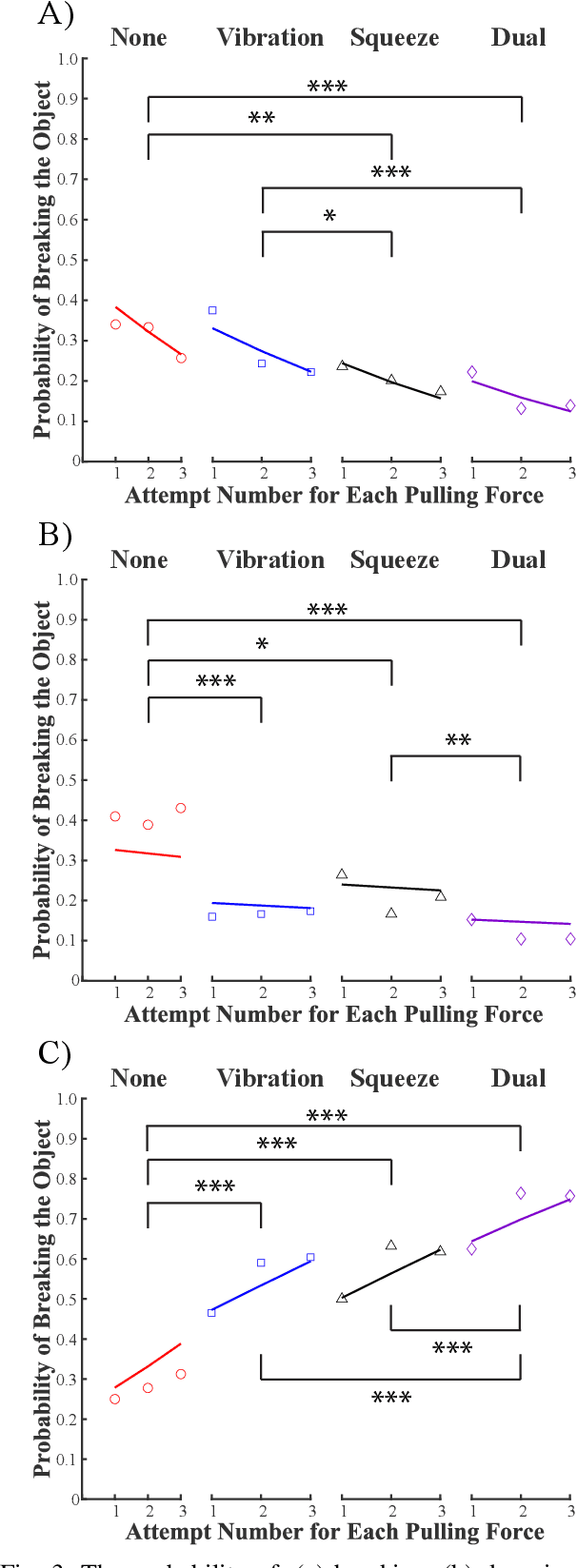
Upper-extremity amputees who use myoelectric prostheses currently lack the haptic sensory information needed to perform dexterous activities of daily living. While considerable research has focused on restoring this haptic information, these approaches often rely on single-modality feedback schemes which are necessary but insufficient for the feedforward and feedback control strategies employed by the central nervous system. Multi-modality feedback approaches have been gaining attention in several application domains, however, the utility for myoelectric prosthesis use remains unclear. In this study, we investigated the utility of dual-modality haptic feedback in a virtual EMG-controlled grasp-and-hold task with a brittle object and variable load force. We recruited N=20 non-amputee participants to perform the task in four conditions: no feedback, vibration feedback of incipient slip, squeezing feedback of grip force, and dual (vibration + squeezing) feedback of incipient slip and grip force. Results suggest that receiving any feedback is better than receiving none, however, dual-modality feedback is far superior to either single-modality feedback approach in terms of preventing the object from breaking or dropping, even after it started slipping. Control with dual-modality feedback was also seen as more intuitive than with either of the single-modality feedback approaches.
Haptic Shared Control Improves Neural Efficiency During Myoelectric Prosthesis Use
May 27, 2022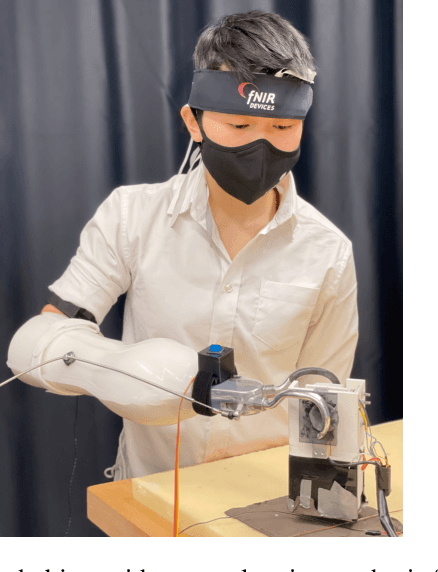
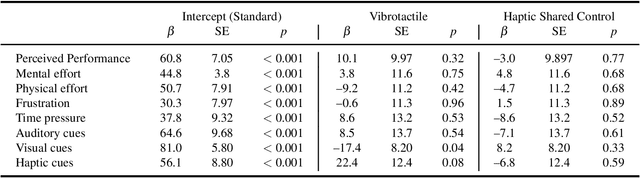
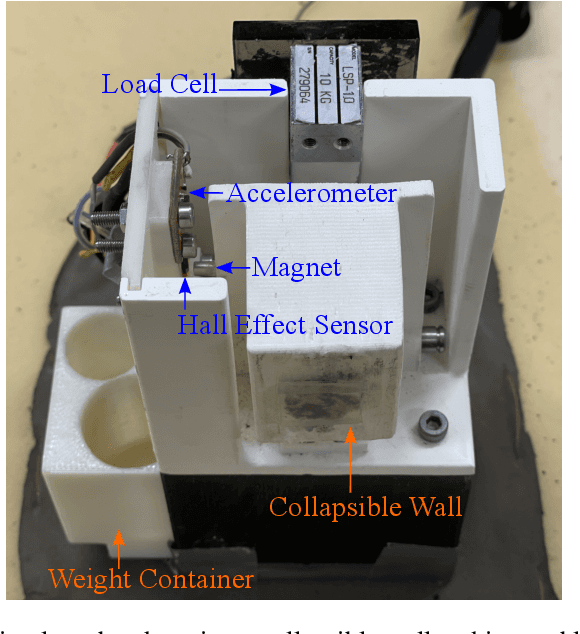

Clinical myoelectric prostheses lack the sensory feedback and sufficient dexterity required to complete activities of daily living efficiently and accurately. Providing haptic feedback of relevant environmental cues to the user or imbuing the prosthesis with autonomous control authority have been separately shown to improve prosthesis utility. Few studies, however, have investigated the effect of combining these two approaches in a shared control paradigm, and none have evaluated such an approach from the perspective of neural efficiency (the relationship between task performance and mental effort measured directly from the brain). In this work, we analyzed the neural efficiency of 30 non-amputee participants in a grasp-and-lift task of a brittle object. Here, a myoelectric prosthesis featuring vibrotactile feedback of grip force and autonomous control of grasping was compared with a standard myoelectric prosthesis with and without vibrotactile feedback. As a measure of mental effort, we captured the prefrontal cortex activity changes using functional near infrared spectroscopy during the experiment. Results showed that only the haptic shared control system enabled users to achieve high neural efficiency, and that vibrotactile feedback was important for grasping with the appropriate grip force. These results indicate that the haptic shared control system synergistically combines the benefits of haptic feedback and autonomous controllers, and is well-poised to inform such hybrid advancements in myoelectric prosthesis technology.
The Utility of Synthetic Reflexes and Haptic Feedback for Upper-Limb Prostheses in a Dexterous Task Without Direct Vision
May 27, 2022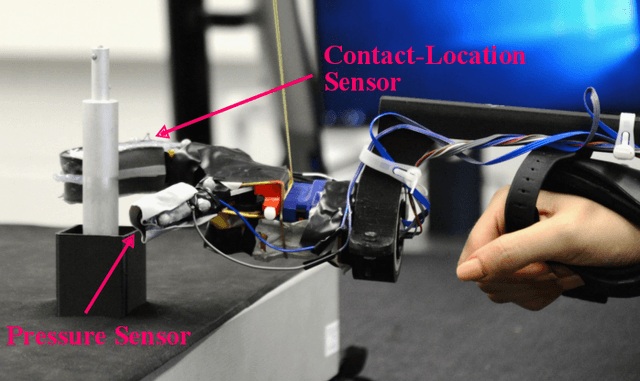


Individuals who use myoelectric upper-limb prostheses often rely heavily on vision to complete their daily activities. They thus struggle in situations where vision is overloaded, such as multitasking, or unavailable, such as poor lighting conditions. Non-amputees can easily accomplish such tasks due to tactile reflexes and haptic sensation guiding their upper-limb motor coordination. Based on these principles, we developed and tested two novel prosthesis systems that incorporate autonomous controllers and provide the user with touch-location feedback through either vibration or distributed pressure. These capabilities were made possible by installing a custom contact-location sensor on thefingers of a commercial prosthetic hand, along with a custom pressure sensor on the thumb. We compared the performance of the two systems against a standard myoelectric prosthesis and a myoelectric prosthesis with only autonomous controllers in a difficult reach-to-pick-and-place task conducted without direct vision. Results from 40 non-amputee participants in this between-subjects study indicated that vibrotactile feedback combined with synthetic reflexes proved significantly more advantageous than the standard prosthesis in several of the task milestones. In addition, vibrotactile feedback and synthetic reflexes improved grasp placement compared to only synthetic reflexes or pressure feedback combined with synthetic reflexes. These results indicate that both autonomous controllers and haptic feedback facilitate success in dexterous tasks without vision, and that the type of haptic display matters.
A novel teleoperator testbed to understand the effects of master-slave dynamics on embodiment and kinesthetic perception *
Jul 22, 2021



With the rising popularity of telerobotic systems, the focus on transparency with regards to haptic perception is also increasing. Transparency, however, represents a theoretical ideal as most bilateral force-reflecting telerobots introduce dynamics (stiffness and damping) between the operator and the environment. To achieve true dexterity, it will be essential to understand how humans embody the dynamics of these telerobots and thereby distinguish them from the environment they are exploring. In this short manuscript, we introduce a novel single degree-of-freedom testbed designed to perform psychophysical and task performance assessments of kinesthetic perception during telerobotic exploration. The system is capable of being configured as a rigid mechanical teleoperator, a dynamic mechanical teleoperator, and an electromechanicaal teleoperator. We performed prefatory system identification and found that the system is capable of simulating telerobotic exploration necessary to understand the impact of master-slave dynamics on kinesthetic perception.
Preliminary investigation into how limb choice affects kinesthetic perception
Jul 22, 2021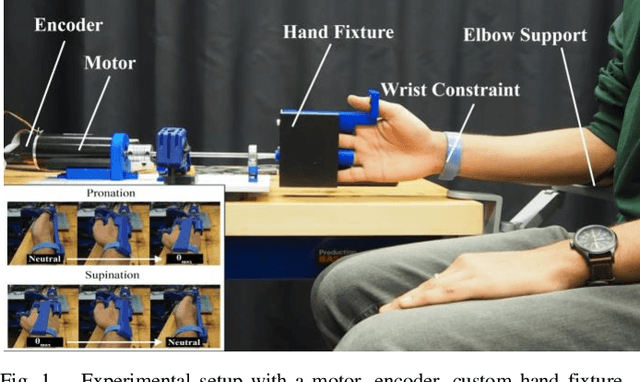


We have a limited understanding of how we integrate haptic information in real-time from our upper limbs to perform complex bimanual tasks, an ability that humans routinely employ to perform tasks of varying levels of difficulty. In order to understand how information from both limbs is used to create a unified percept, it is important to study both the limbs separately first. Prevalent theories highlighting the role of central nervous system (CNS) in accounting for internal body dynamics seem to suggest that both upper limbs should be equally sensitive to external stimuli. However, there is empirical proof demonstrating a perceptual difference in our upper limbs for tasks like shape discrimination, prompting the need to study effects of limb choice on kinesthetic perception. In this manuscript, we start evaluating Just Noticeable Difference (JND) for stiffness for both forearms separately. Early results validate the need for a more thorough investigation of limb choice on kinesthetic perception.
Investigating the effects of exploration dynamics on stiffness perception
Jul 22, 2021

The utility of Human-in-the-loop telerobotic systems (HiLTS) is driven in part by the quality of feedback it can provide to the operator. While the dynamic interaction between robot and environment can often be sensed or modeled, the dynamic coupling of the human-robot interface is often overlooked. Enabling dexterous manipulation through HiLTS however, will require careful consideration of human haptic perception as it relates to the human's changing limb impedance at the human-robot interface. In this manuscript, we present results from a stiffness perception task run on a simple 1-DoF rotational kinesthetic device at three different angular velocities, based on participant's natural exploration strategy. We evaluated performance effects of exploration velocity as a proxy measurement for limb impedance and the results indicate the need to further investigate how the human body incorporates its knowledge of the body dynamics in kinesthetic perception under active exploration.
Towards an understanding of how humans perceive stiffness during bimanual exploration
Jul 22, 2021



In this paper, an experimental testbed and associated psychophysical paradigm are presented for understanding how people discriminate torsional stiffness using wrist rotation about their forearm. Featured in the testbed are two 1-DoF rotary kinesthetic haptic devices. An adaptive staircase was used to evaluate JNDs for a stiffness discrimination task where participants explored virtual torsion springs by rotating their forearms. The JNDs were evaluated across seven different conditions, under four different exploration modes: bimanual, unimanual, bimanual feedback for unimanual displacement, and unimanual feedback for bimanual displacement. The discrimination results will inform future investigation into understanding how stiffness percepts vary.