 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiscale Voxel Based Decoding For Enhanced Natural Image Reconstruction From Brain Activity
May 27, 2022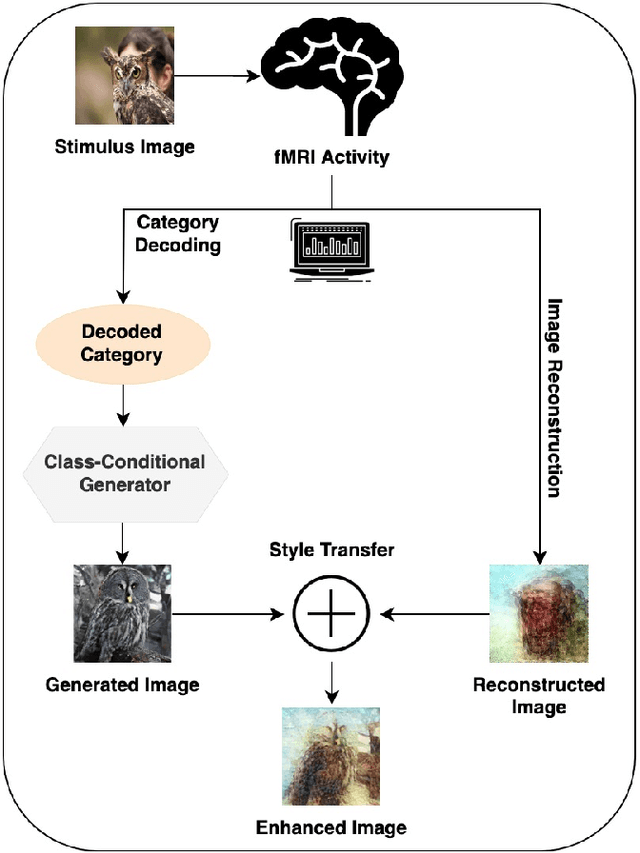


Reconstructing perceived images from human brain activity monitored by functional magnetic resonance imaging (fMRI) is hard, especially for natural images. Existing methods often result in blurry and unintelligible reconstructions with low fidelity. In this study, we present a novel approach for enhanced image reconstruction, in which existing methods for object decoding and image reconstruction are merged together. This is achieved by conditioning the reconstructed image to its decoded image category using a class-conditional generative adversarial network and neural style transfer. The results indicate that our approach improves the semantic similarity of the reconstructed images and can be used as a general framework for enhanced image reconstruction.
Haptic Shared Control Improves Neural Efficiency During Myoelectric Prosthesis Use
May 27, 2022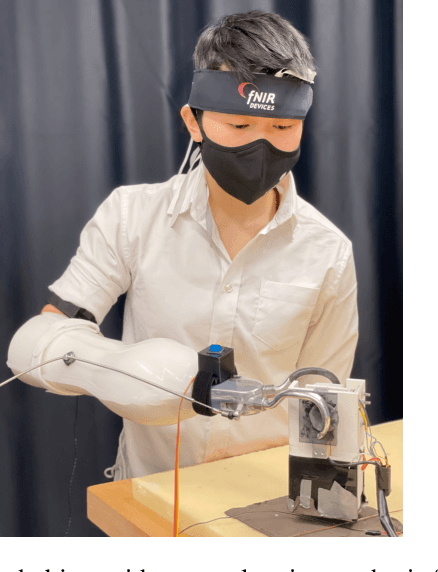
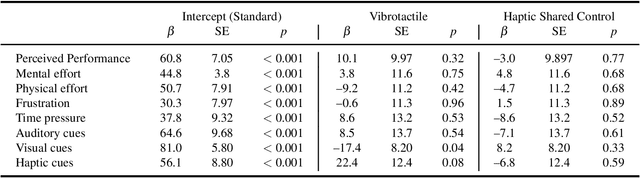
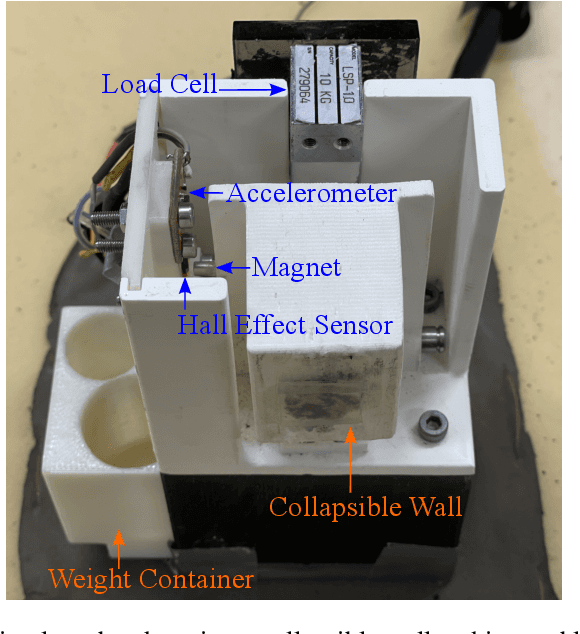

Clinical myoelectric prostheses lack the sensory feedback and sufficient dexterity required to complete activities of daily living efficiently and accurately. Providing haptic feedback of relevant environmental cues to the user or imbuing the prosthesis with autonomous control authority have been separately shown to improve prosthesis utility. Few studies, however, have investigated the effect of combining these two approaches in a shared control paradigm, and none have evaluated such an approach from the perspective of neural efficiency (the relationship between task performance and mental effort measured directly from the brain). In this work, we analyzed the neural efficiency of 30 non-amputee participants in a grasp-and-lift task of a brittle object. Here, a myoelectric prosthesis featuring vibrotactile feedback of grip force and autonomous control of grasping was compared with a standard myoelectric prosthesis with and without vibrotactile feedback. As a measure of mental effort, we captured the prefrontal cortex activity changes using functional near infrared spectroscopy during the experiment. Results showed that only the haptic shared control system enabled users to achieve high neural efficiency, and that vibrotactile feedback was important for grasping with the appropriate grip force. These results indicate that the haptic shared control system synergistically combines the benefits of haptic feedback and autonomous controllers, and is well-poised to inform such hybrid advancements in myoelectric prosthesis technology.