 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel teleoperator testbed to understand the effects of master-slave dynamics on embodiment and kinesthetic perception *
Jul 22, 2021



With the rising popularity of telerobotic systems, the focus on transparency with regards to haptic perception is also increasing. Transparency, however, represents a theoretical ideal as most bilateral force-reflecting telerobots introduce dynamics (stiffness and damping) between the operator and the environment. To achieve true dexterity, it will be essential to understand how humans embody the dynamics of these telerobots and thereby distinguish them from the environment they are exploring. In this short manuscript, we introduce a novel single degree-of-freedom testbed designed to perform psychophysical and task performance assessments of kinesthetic perception during telerobotic exploration. The system is capable of being configured as a rigid mechanical teleoperator, a dynamic mechanical teleoperator, and an electromechanicaal teleoperator. We performed prefatory system identification and found that the system is capable of simulating telerobotic exploration necessary to understand the impact of master-slave dynamics on kinesthetic perception.
Preliminary investigation into how limb choice affects kinesthetic perception
Jul 22, 2021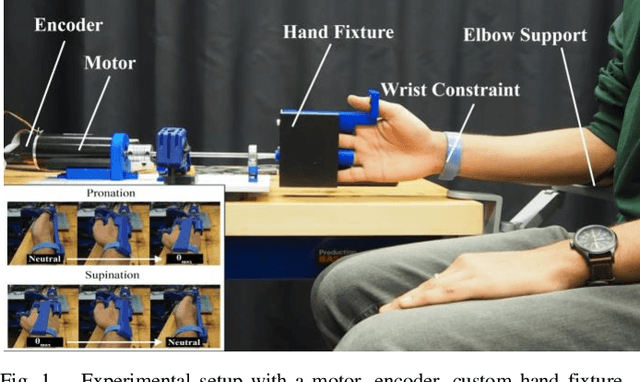

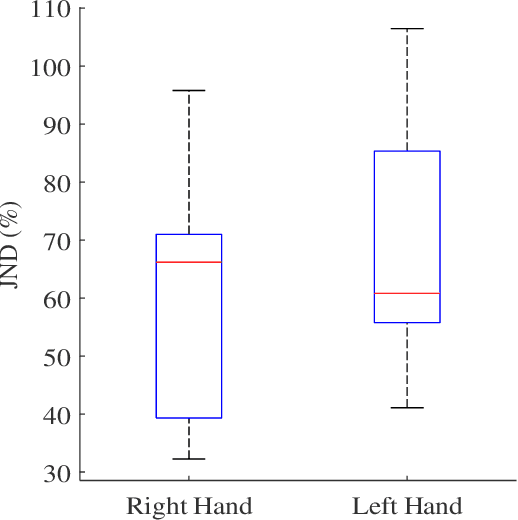

We have a limited understanding of how we integrate haptic information in real-time from our upper limbs to perform complex bimanual tasks, an ability that humans routinely employ to perform tasks of varying levels of difficulty. In order to understand how information from both limbs is used to create a unified percept, it is important to study both the limbs separately first. Prevalent theories highlighting the role of central nervous system (CNS) in accounting for internal body dynamics seem to suggest that both upper limbs should be equally sensitive to external stimuli. However, there is empirical proof demonstrating a perceptual difference in our upper limbs for tasks like shape discrimination, prompting the need to study effects of limb choice on kinesthetic perception. In this manuscript, we start evaluating Just Noticeable Difference (JND) for stiffness for both forearms separately. Early results validate the need for a more thorough investigation of limb choice on kinesthetic perception.
Investigating the effects of exploration dynamics on stiffness perception
Jul 22, 2021

The utility of Human-in-the-loop telerobotic systems (HiLTS) is driven in part by the quality of feedback it can provide to the operator. While the dynamic interaction between robot and environment can often be sensed or modeled, the dynamic coupling of the human-robot interface is often overlooked. Enabling dexterous manipulation through HiLTS however, will require careful consideration of human haptic perception as it relates to the human's changing limb impedance at the human-robot interface. In this manuscript, we present results from a stiffness perception task run on a simple 1-DoF rotational kinesthetic device at three different angular velocities, based on participant's natural exploration strategy. We evaluated performance effects of exploration velocity as a proxy measurement for limb impedance and the results indicate the need to further investigate how the human body incorporates its knowledge of the body dynamics in kinesthetic perception under active exploration.
Towards an understanding of how humans perceive stiffness during bimanual exploration
Jul 22, 2021



In this paper, an experimental testbed and associated psychophysical paradigm are presented for understanding how people discriminate torsional stiffness using wrist rotation about their forearm. Featured in the testbed are two 1-DoF rotary kinesthetic haptic devices. An adaptive staircase was used to evaluate JNDs for a stiffness discrimination task where participants explored virtual torsion springs by rotating their forearms. The JNDs were evaluated across seven different conditions, under four different exploration modes: bimanual, unimanual, bimanual feedback for unimanual displacement, and unimanual feedback for bimanual displacement. The discrimination results will inform future investigation into understanding how stiffness percepts vary.
Towards an Understanding of the Role Operator Limb Dynamics Plays in Haptic Perception of Stiffness
Jul 22, 2021


Creating haptic interfaces capable of rendering the rich sensation needed for dexterous manipulation is crucial for the advancement of human-in-the-loop telerobotic systems (HiLTS). One limiting factor has been the absence of detailed knowledge of the effect of operator limb dynamics and haptic exploration dynamics on haptic perception. We propose to begin investigations of these effects with single-joint haptic exploration and feedback of physical and virtual environments. Here, we present our experimental apparatus, a 1-DoF rotational kinesthetic haptic device and electromyography (EMG) system, along with preliminary findings from our efforts to investigate the change in stiffness discrimination thresholds for differing exploration velocities. Result trends indicate a possible relationship between exploration velocity and discrimination thresholds, as well as a complex interaction between muscle activation, exploration velocity, and haptic feedback.
A novel testbed for investigating the impact of teleoperator dynamics on perceived environment dynamics
Jul 22, 2021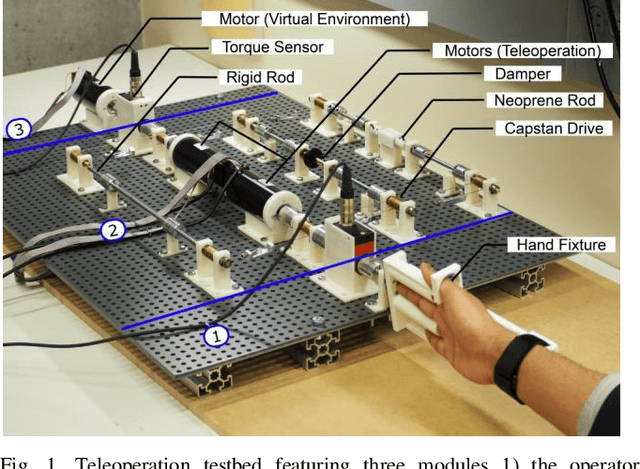
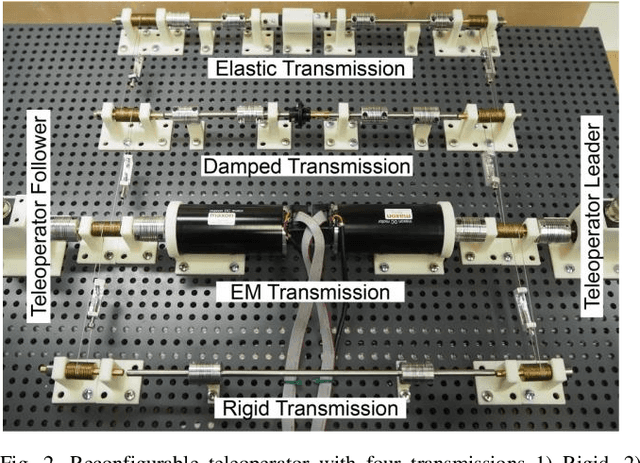
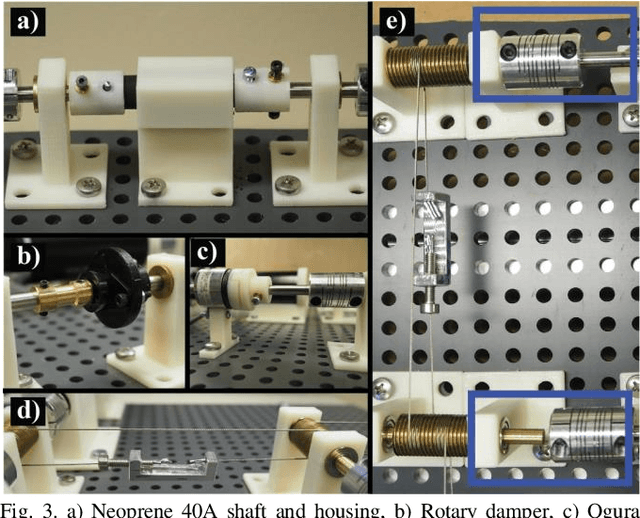
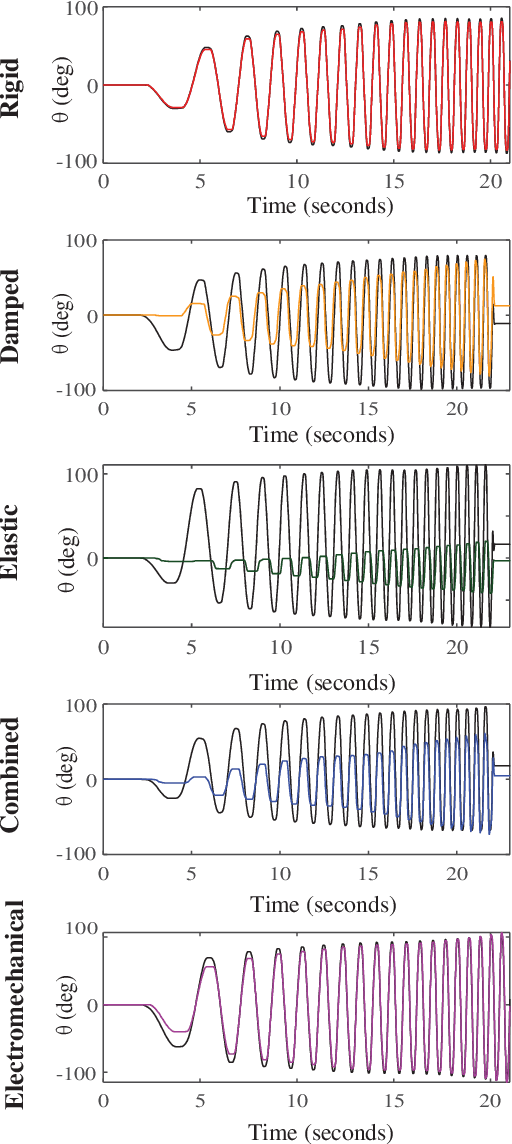
Human-in-the-loop telerobotic systems (HiLTS) are robotic tools designed to extend and in some circumstances improve the dexterous capabilities of the human operator in virtual and remote environments. Dexterous manipulation, however, depends on how well the telerobot is incorporated into the operator's sensorimotor control scheme. Empirical evidence suggests that haptic feedback can lead to improved dexterity. Unfortunately, haptic feedback can also introduce dynamics between the leader and follower of the telerobot that affect both stability and device performance. While concerted research effort has focused on masking these device dynamics or bypassing them altogether, it is not well understood how human operators incorporate these dynamics into their control scheme. We believe that to advance dexterous telerobotic manipulation, it is crucial to understand the process by which humans operators incorporate teleoperator dynamics and distinguish them from the dynamics of the environment. Key to this knowledge is an understanding of how advanced telerobotic architectures compare to the gold standard, the rigid mechanical teleoperators first introduced in the 1950's. In this manuscript, we present a teleoperator testbed that has reconfigurable transmissions between the leader and follower to change its dynamic behavior. The intent of this testbed is to investigate the effect of the teleoperator's dynamics on perception of and task performance in the remote/virtual environment. We describe the hardware and software components of the testbed and then demonstrate how the different teleoperator transmissions can lead to differences, sometimes significant, in the dynamics that would be felt by the operator when exploring the same environment.