 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel testbed for investigating the impact of teleoperator dynamics on perceived environment dynamics
Paper and Code
Jul 22, 2021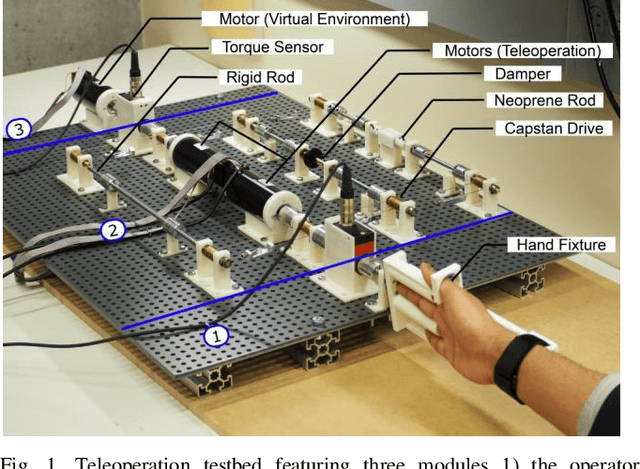
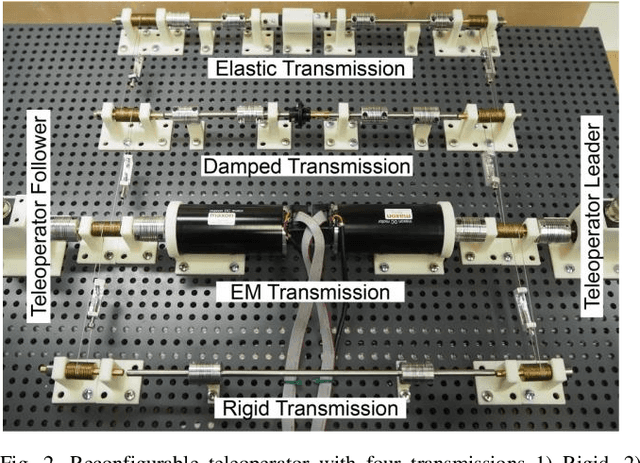
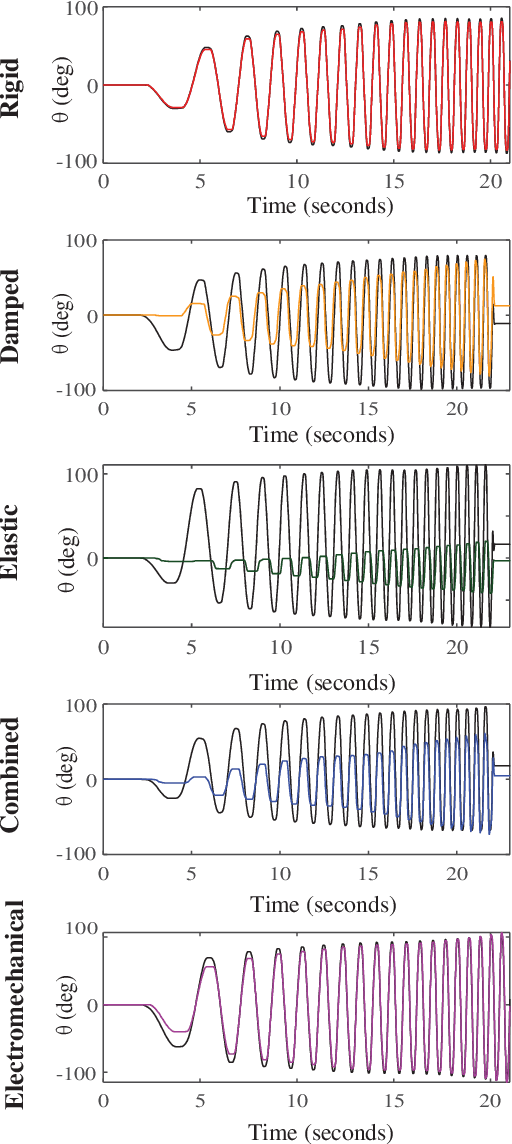
Human-in-the-loop telerobotic systems (HiLTS) are robotic tools designed to extend and in some circumstances improve the dexterous capabilities of the human operator in virtual and remote environments. Dexterous manipulation, however, depends on how well the telerobot is incorporated into the operator's sensorimotor control scheme. Empirical evidence suggests that haptic feedback can lead to improved dexterity. Unfortunately, haptic feedback can also introduce dynamics between the leader and follower of the telerobot that affect both stability and device performance. While concerted research effort has focused on masking these device dynamics or bypassing them altogether, it is not well understood how human operators incorporate these dynamics into their control scheme. We believe that to advance dexterous telerobotic manipulation, it is crucial to understand the process by which humans operators incorporate teleoperator dynamics and distinguish them from the dynamics of the environment. Key to this knowledge is an understanding of how advanced telerobotic architectures compare to the gold standard, the rigid mechanical teleoperators first introduced in the 1950's. In this manuscript, we present a teleoperator testbed that has reconfigurable transmissions between the leader and follower to change its dynamic behavior. The intent of this testbed is to investigate the effect of the teleoperator's dynamics on perception of and task performance in the remote/virtual environment. We describe the hardware and software components of the testbed and then demonstrate how the different teleoperator transmissions can lead to differences, sometimes significant, in the dynamics that would be felt by the operator when exploring the same environment.