 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaster VGGT with Block-Sparse Global Attention
Sep 08, 2025Efficient and accurate feed-forward multi-view reconstruction has long been an important task in computer vision. Recent transformer-based models like VGGT and $\pi^3$ have achieved impressive results with simple architectures, yet they face an inherent runtime bottleneck, due to the quadratic complexity of the global attention layers, that limits the scalability to large image sets. In this paper, we empirically analyze the global attention matrix of these models and observe that probability mass concentrates on a small subset of patch-patch interactions that correspond to cross-view geometric matches. Motivated by the structured attention and inspired by recent advancement in large language models, we propose a replacement for the dense global attention operation based on highly optimized block-sparse kernels, yielding up to $4\times$ faster inference with comparable task performance. Our retrofit requires no retraining of the backbone, extends to both VGGT and $\pi^3$, and supports large image collections. Evaluations on a comprehensive suite of multi-view benchmarks demonstrate the effectiveness of our approach.
OpenSplat3D: Open-Vocabulary 3D Instance Segmentation using Gaussian Splatting
Jun 09, 20253D Gaussian Splatting (3DGS) has emerged as a powerful representation for neural scene reconstruction, offering high-quality novel view synthesis while maintaining computational efficiency. In this paper, we extend the capabilities of 3DGS beyond pure scene representation by introducing an approach for open-vocabulary 3D instance segmentation without requiring manual labeling, termed OpenSplat3D. Our method leverages feature-splatting techniques to associate semantic information with individual Gaussians, enabling fine-grained scene understanding. We incorporate Segment Anything Model instance masks with a contrastive loss formulation as guidance for the instance features to achieve accurate instance-level segmentation. Furthermore, we utilize language embeddings of a vision-language model, allowing for flexible, text-driven instance identification. This combination enables our system to identify and segment arbitrary objects in 3D scenes based on natural language descriptions. We show results on LERF-mask and LERF-OVS as well as the full ScanNet++ validation set, demonstrating the effectiveness of our approach.
Look Gauss, No Pose: Novel View Synthesis using Gaussian Splatting without Accurate Pose Initialization
Oct 11, 2024
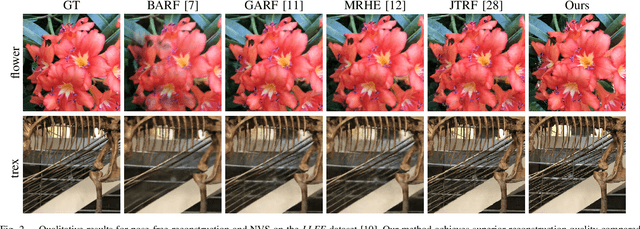
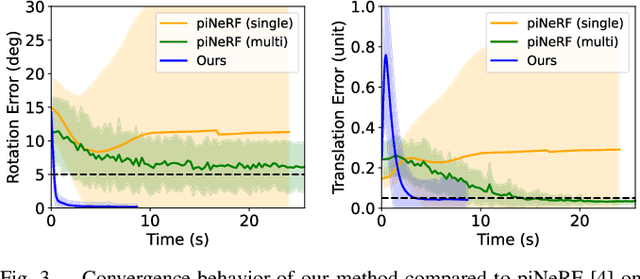
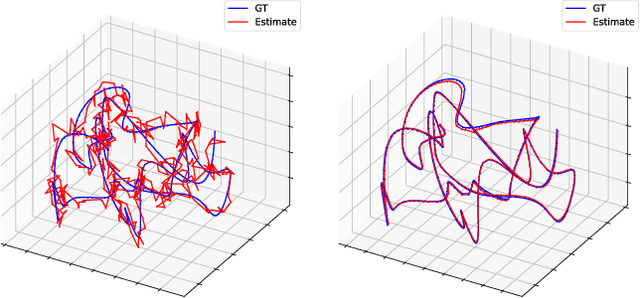
3D Gaussian Splatting has recently emerged as a powerful tool for fast and accurate novel-view synthesis from a set of posed input images. However, like most novel-view synthesis approaches, it relies on accurate camera pose information, limiting its applicability in real-world scenarios where acquiring accurate camera poses can be challenging or even impossible. We propose an extension to the 3D Gaussian Splatting framework by optimizing the extrinsic camera parameters with respect to photometric residuals. We derive the analytical gradients and integrate their computation with the existing high-performance CUDA implementation. This enables downstream tasks such as 6-DoF camera pose estimation as well as joint reconstruction and camera refinement. In particular, we achieve rapid convergence and high accuracy for pose estimation on real-world scenes. Our method enables fast reconstruction of 3D scenes without requiring accurate pose information by jointly optimizing geometry and camera poses, while achieving state-of-the-art results in novel-view synthesis. Our approach is considerably faster to optimize than most competing methods, and several times faster in rendering. We show results on real-world scenes and complex trajectories through simulated environments, achieving state-of-the-art results on LLFF while reducing runtime by two to four times compared to the most efficient competing method. Source code will be available at https://github.com/Schmiddo/noposegs .