 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomy Infused Teleoperation with Application to BCI Manipulation
Jun 07, 2015
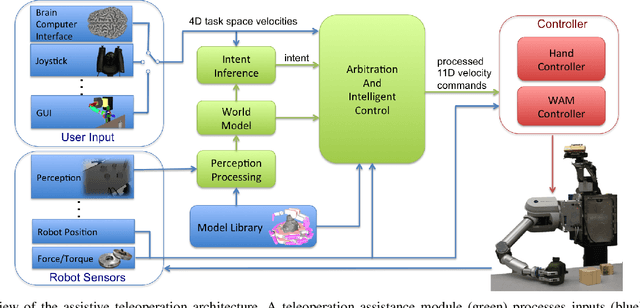

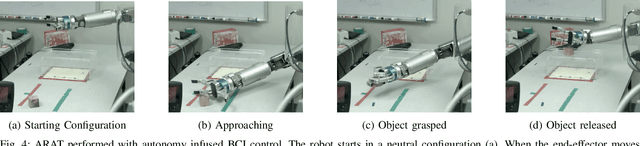
Robot teleoperation systems face a common set of challenges including latency, low-dimensional user commands, and asymmetric control inputs. User control with Brain-Computer Interfaces (BCIs) exacerbates these problems through especially noisy and erratic low-dimensional motion commands due to the difficulty in decoding neural activity. We introduce a general framework to address these challenges through a combination of computer vision, user intent inference, and arbitration between the human input and autonomous control schemes. Adjustable levels of assistance allow the system to balance the operator's capabilities and feelings of comfort and control while compensating for a task's difficulty. We present experimental results demonstrating significant performance improvement using the shared-control assistance framework on adapted rehabilitation benchmarks with two subjects implanted with intracortical brain-computer interfaces controlling a seven degree-of-freedom robotic manipulator as a prosthetic. Our results further indicate that shared assistance mitigates perceived user difficulty and even enables successful performance on previously infeasible tasks. We showcase the extensibility of our architecture with applications to quality-of-life tasks such as opening a door, pouring liquids from containers, and manipulation with novel objects in densely cluttered environments.