 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Experimental Evaluation of a Haptic Robot-Assisted System for Femur Fracture Surgery
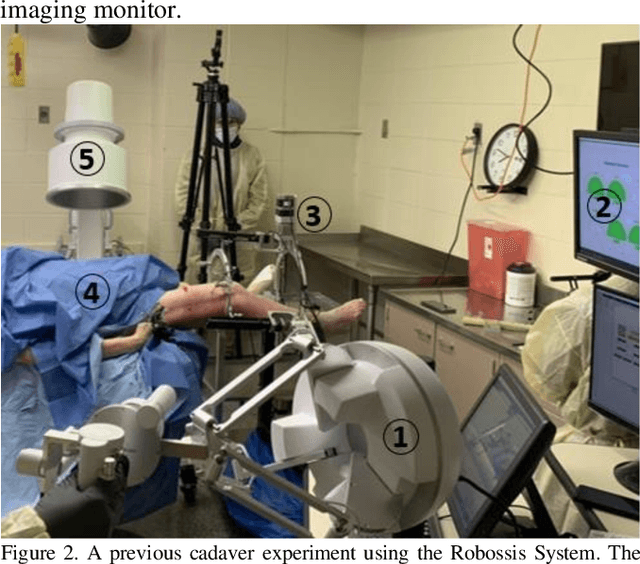
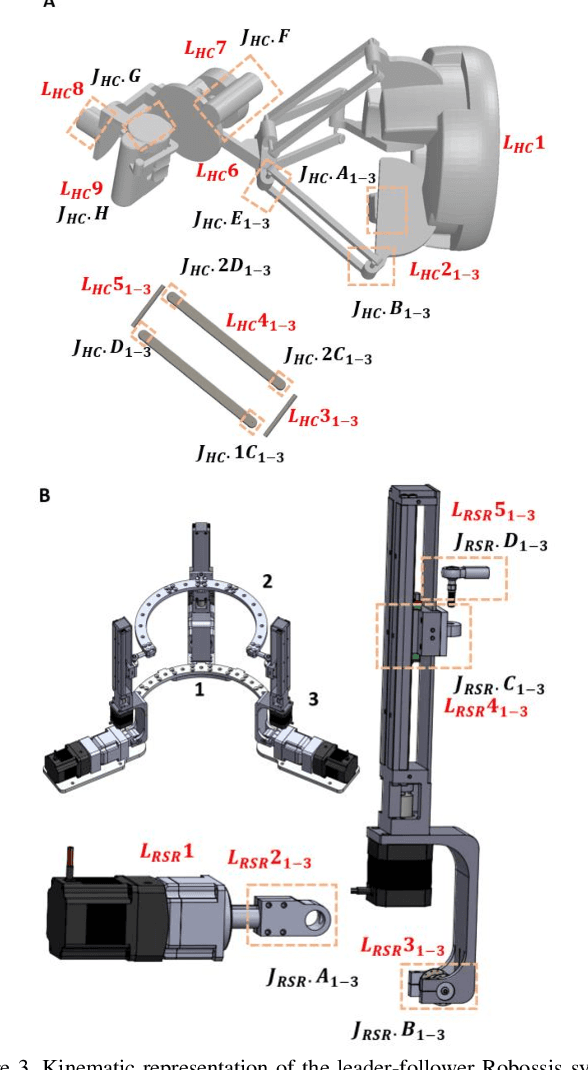
Oct 29, 2023In the face of challenges encountered during femur fracture surgery, such as the high rates of malalignment and X-ray exposure to operating personnel, robot-assisted surgery has emerged as an alternative to conventional state-of-the-art surgical methods. This paper introduces the development of Robossis, a haptic system for robot-assisted femur fracture surgery. Robossis comprises a 7-DOF haptic controller and a 6-DOF surgical robot. A unilateral control architecture is developed to address the kinematic mismatch and the motion transfer between the haptic controller and the Robossis surgical robot. A real-time motion control pipeline is designed to address the motion transfer and evaluated through experimental testing. The analysis illustrates that the Robossis surgical robot can adhere to the desired trajectory from the haptic controller with an average translational error of 0.32 mm and a rotational error of 0.07 deg. Additionally, a haptic rendering pipeline is developed to resolve the kinematic mismatch by constraining the haptic controller (user hand) movement within the permissible joint limits of the Robossis surgical robot. Lastly, in a cadaveric lab test, the Robossis system assisted surgeons during a mock femur fracture surgery. The result shows that Robossis can provide an intuitive solution for surgeons to perform femur fracture surgery.
Haptic-Enhanced Virtual Reality Simulator for Robot-Assisted Femur Fracture Surgery
Oct 29, 2023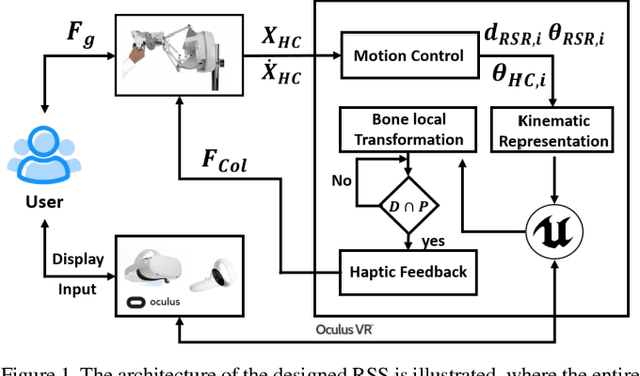
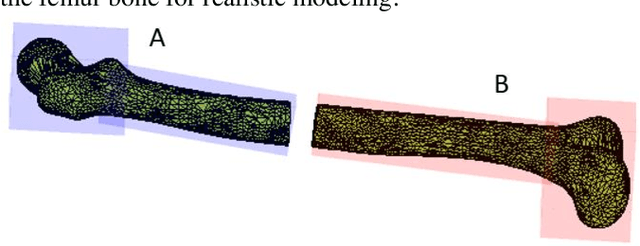
In this paper, we develop a virtual reality (VR) simulator for the Robossis robot-assisted femur fracture surgery. Due to the steep learning curve for such procedures, a VR simulator is essential for training surgeon(s) and staff. The Robossis Surgical Simulator (RSS) is designed to immerse user(s) in a realistic surgery setting using the Robossis system as completed in a previous real-world cadaveric procedure. The RSS is designed to interface the Sigma-7 Haptic Controller with the Robossis Surgical Robot (RSR) and the Meta Quest VR headset. Results show that the RSR follows user commands in 6 DOF and prevents the overlapping of bone segments. This development demonstrates a promising avenue for future implementation of the Robossis system.
Pelvis Surface Estimation From Partial CT for Computer-Aided Pelvic Osteotomies
Sep 23, 2019
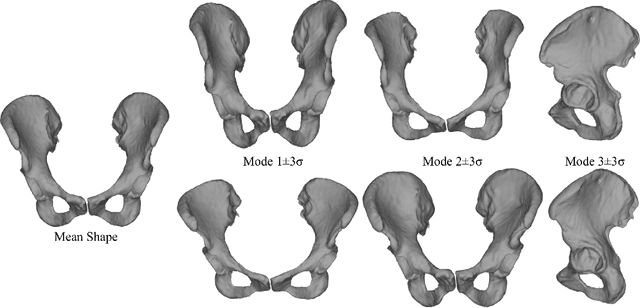
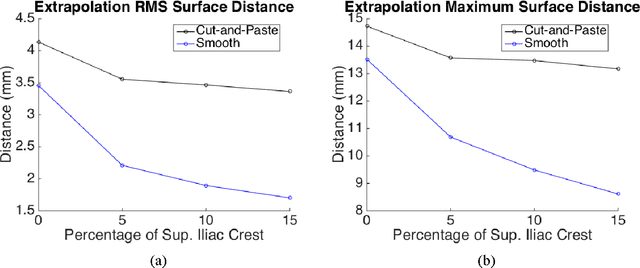
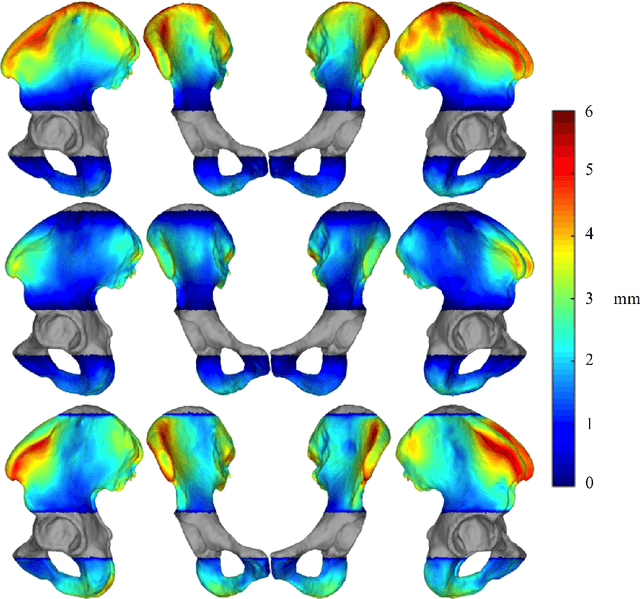
Computer-aided surgical systems commonly use preoperative CT scans when performing pelvic osteotomies for intraoperative navigation. These systems have the potential to improve the safety and accuracy of pelvic osteotomies, however, exposing the patient to radiation is a significant drawback. In order to reduce radiation exposure, we propose a new smooth extrapolation method leveraging a partial pelvis CT and a statistical shape model (SSM) of the full pelvis in order to estimate a patient's complete pelvis. A SSM of normal, complete, female pelvis anatomy was created and evaluated from 42 subjects. A leave-one-out test was performed to characterise the inherent generalisation capability of the SSM. An additional leave-one-out test was conducted to measure performance of the smooth extrapolation method and an existing "cut-and-paste" extrapolation method. Unknown anatomy was simulated by keeping the axial slices of the patient's acetabulum intact and varying the amount of the superior iliac crest retained; from 0% to 15% of the total pelvis extent. The smooth technique showed an average improvement over the cut-and-paste method of 1.31 mm and 3.61 mm, in RMS and maximum surface error, respectively. With 5% of the iliac crest retained, the smoothly estimated surface had an RMS surface error of 2.21 mm, an improvement of 1.25 mm when retaining none of the iliac crest. This anatomical estimation method creates the possibility of a patient and surgeon benefiting from the use of a CAS system and simultaneously reducing the patient's radiation exposure.
* CAOS 2015 Extended Paper