 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning-Driven Autonomous System for Retinal Vein Cannulation: Validation Using a Chicken Embryo Model
Jul 29, 2025Retinal vein cannulation (RVC) is a minimally invasive microsurgical procedure for treating retinal vein occlusion (RVO), a leading cause of vision impairment. However, the small size and fragility of retinal veins, coupled with the need for high-precision, tremor-free needle manipulation, create significant technical challenges. These limitations highlight the need for robotic assistance to improve accuracy and stability. This study presents an automated robotic system with a top-down microscope and B-scan optical coherence tomography (OCT) imaging for precise depth sensing. Deep learning-based models enable real-time needle navigation, contact detection, and vein puncture recognition, using a chicken embryo model as a surrogate for human retinal veins. The system autonomously detects needle position and puncture events with 85% accuracy. The experiments demonstrate notable reductions in navigation and puncture times compared to manual methods. Our results demonstrate the potential of integrating advanced imaging and deep learning to automate microsurgical tasks, providing a pathway for safer and more reliable RVC procedures with enhanced precision and reproducibility.
Evaluation of a motion measurement system for PET imaging studies
Dec 06, 2023Positron Emission Tomography (PET) enables functional imaging of deep brain structures, but the bulk and weight of current systems preclude their use during many natural human activities, such as locomotion. The proposed long-term solution is to construct a robotic system that can support an imaging system surrounding the subject's head, and then move the system to accommodate natural motion. This requires a system to measure the motion of the head with respect to the imaging ring, for use by both the robotic system and the image reconstruction software. We report here the design and experimental evaluation of a parallel string encoder mechanism for sensing this motion. Our preliminary results indicate that the measurement system may achieve accuracy within 0.5 mm, especially for small motions, with improved accuracy possible through kinematic calibration.
Calibration and evaluation of a motion measurement system for PET imaging studies
Nov 29, 2023
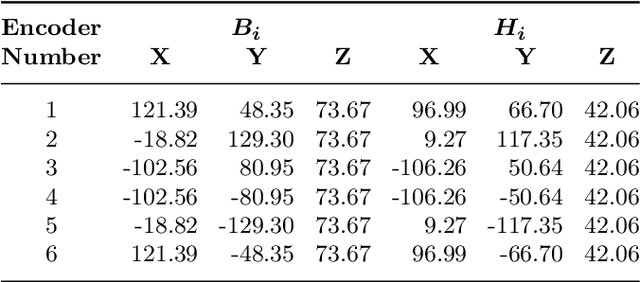


Positron Emission Tomography (PET) enables functional imaging of deep brain structures, but the bulk and weight of current systems preclude their use during many natural human activities, such as locomotion. The proposed long-term solution is to construct a robotic system that can support an imaging system surrounding the subject's head, and then move the system to accommodate natural motion. This requires a system to measure the motion of the head with respect to the imaging ring, for use by both the robotic system and the image reconstruction software. We report here the design, calibration, and experimental evaluation of a parallel string encoder mechanism for sensing this motion. Our results indicate that with kinematic calibration, the measurement system can achieve accuracy within 0.5mm, especially for small motions.
* arXiv admin note: text overlap with arXiv:2311.17863
Method for robotic motion compensation during PET imaging of mobile subjects
Nov 29, 2023Studies of the human brain during natural activities, such as locomotion, would benefit from the ability to image deep brain structures during these activities. While Positron Emission Tomography (PET) can image these structures, the bulk and weight of current scanners are not compatible with the desire for a wearable device. This has motivated the design of a robotic system to support a PET imaging system around the subject's head and to move the system to accommodate natural motion. We report here the design and experimental evaluation of a prototype robotic system that senses motion of a subject's head, using parallel string encoders connected between the robot-supported imaging ring and a helmet worn by the subject. This measurement is used to robotically move the imaging ring (coarse motion correction) and to compensate for residual motion during image reconstruction (fine motion correction). Minimization of latency and measurement error are the key design goals, respectively, for coarse and fine motion correction. The system is evaluated using recorded human head motions during locomotion, with a mock imaging system consisting of lasers and cameras, and is shown to provide an overall system latency of about 80 ms, which is sufficient for coarse motion correction and collision avoidance, as well as a measurement accuracy of about 0.5 mm for fine motion correction.
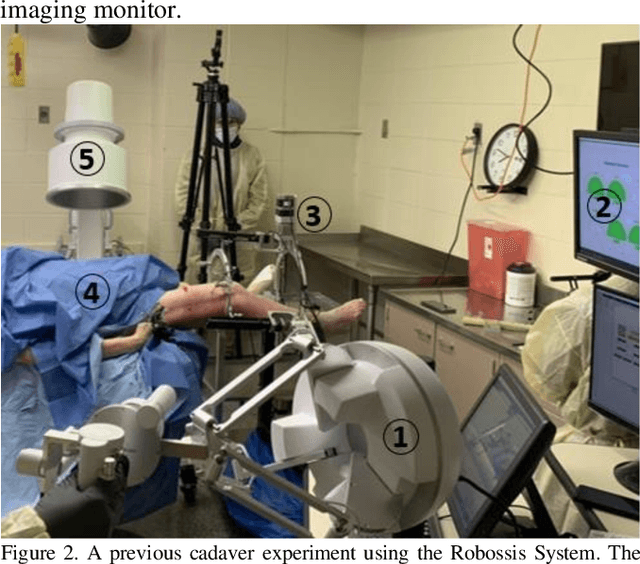
Design and Experimental Evaluation of a Haptic Robot-Assisted System for Femur Fracture Surgery
Oct 29, 2023In the face of challenges encountered during femur fracture surgery, such as the high rates of malalignment and X-ray exposure to operating personnel, robot-assisted surgery has emerged as an alternative to conventional state-of-the-art surgical methods. This paper introduces the development of Robossis, a haptic system for robot-assisted femur fracture surgery. Robossis comprises a 7-DOF haptic controller and a 6-DOF surgical robot. A unilateral control architecture is developed to address the kinematic mismatch and the motion transfer between the haptic controller and the Robossis surgical robot. A real-time motion control pipeline is designed to address the motion transfer and evaluated through experimental testing. The analysis illustrates that the Robossis surgical robot can adhere to the desired trajectory from the haptic controller with an average translational error of 0.32 mm and a rotational error of 0.07 deg. Additionally, a haptic rendering pipeline is developed to resolve the kinematic mismatch by constraining the haptic controller (user hand) movement within the permissible joint limits of the Robossis surgical robot. Lastly, in a cadaveric lab test, the Robossis system assisted surgeons during a mock femur fracture surgery. The result shows that Robossis can provide an intuitive solution for surgeons to perform femur fracture surgery.
Haptic-Enhanced Virtual Reality Simulator for Robot-Assisted Femur Fracture Surgery
Oct 29, 2023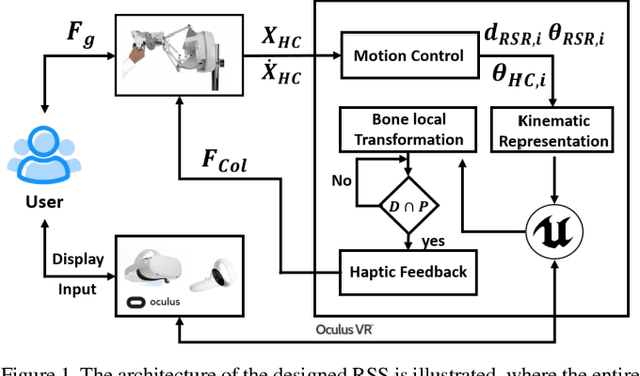
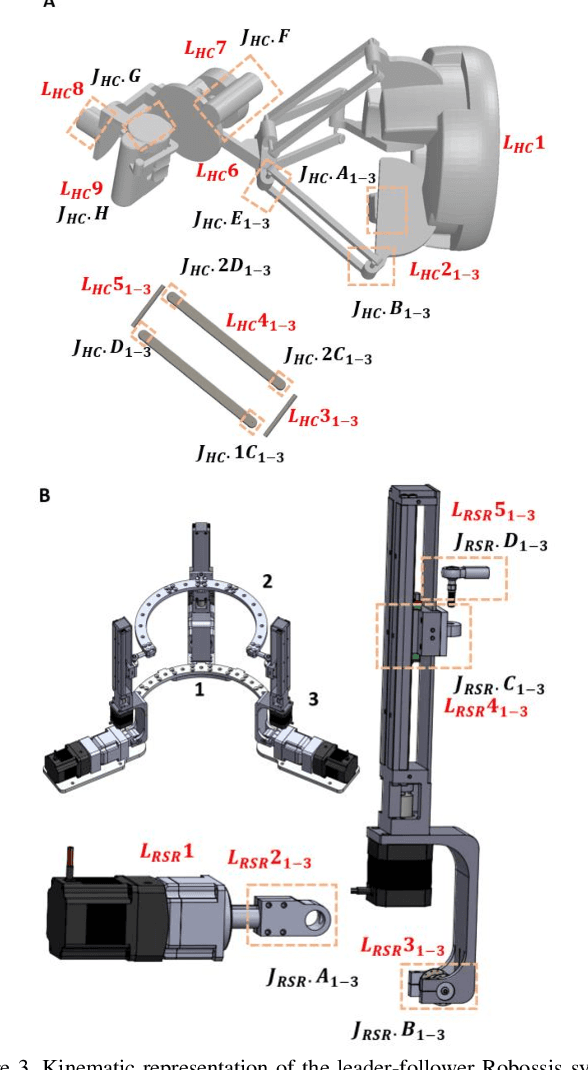
In this paper, we develop a virtual reality (VR) simulator for the Robossis robot-assisted femur fracture surgery. Due to the steep learning curve for such procedures, a VR simulator is essential for training surgeon(s) and staff. The Robossis Surgical Simulator (RSS) is designed to immerse user(s) in a realistic surgery setting using the Robossis system as completed in a previous real-world cadaveric procedure. The RSS is designed to interface the Sigma-7 Haptic Controller with the Robossis Surgical Robot (RSR) and the Meta Quest VR headset. Results show that the RSR follows user commands in 6 DOF and prevents the overlapping of bone segments. This development demonstrates a promising avenue for future implementation of the Robossis system.
Optical Fiber-Based Needle Shape Sensing in Real Tissue: Single Core vs. Multicore Approaches
Sep 08, 2023



Flexible needle insertion procedures are common for minimally-invasive surgeries for diagnosing and treating prostate cancer. Bevel-tip needles provide physicians the capability to steer the needle during long insertions to avoid vital anatomical structures in the patient and reduce post-operative patient discomfort. To provide needle placement feedback to the physician, sensors are embedded into needles for determining the real-time 3D shape of the needle during operation without needing to visualize the needle intra-operatively. Through expansive research in fiber optics, a plethora of bio-compatible, MRI-compatible, optical shape-sensors have been developed to provide real-time shape feedback, such as single-core and multicore fiber Bragg gratings. In this paper, we directly compare single-core fiber-based and multicore fiber-based needle shape-sensing through identically constructed, four-active area sensorized bevel-tip needles inserted into phantom and \exvivo tissue on the same experimental platform. In this work, we found that for shape-sensing in phantom tissue, the two needles performed identically with a $p$-value of $0.164 > 0.05$, but in \exvivo real tissue, the single-core fiber sensorized needle significantly outperformed the multicore fiber configuration with a $p$-value of $0.0005 < 0.05$. This paper also presents the experimental platform and method for directly comparing these optical shape sensors for the needle shape-sensing task, as well as provides direction, insight and required considerations for future work in constructively optimizing sensorized needles.