 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic-Enhanced Virtual Reality Simulator for Robot-Assisted Femur Fracture Surgery
Oct 29, 2023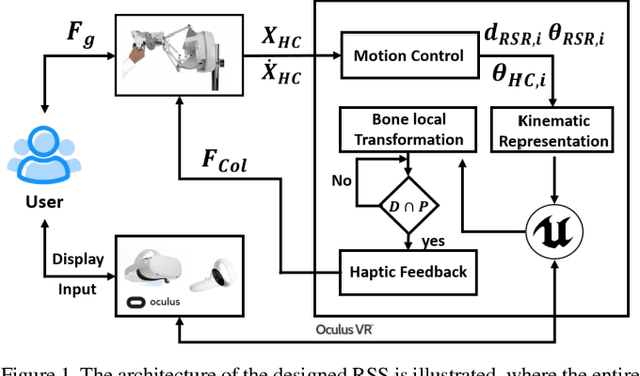
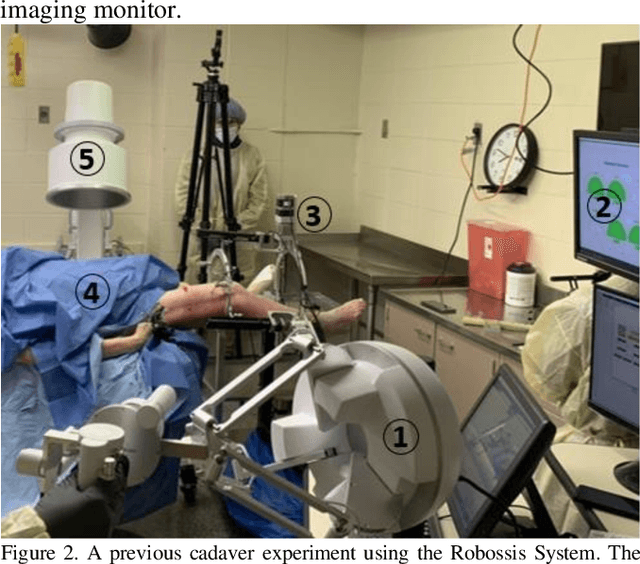
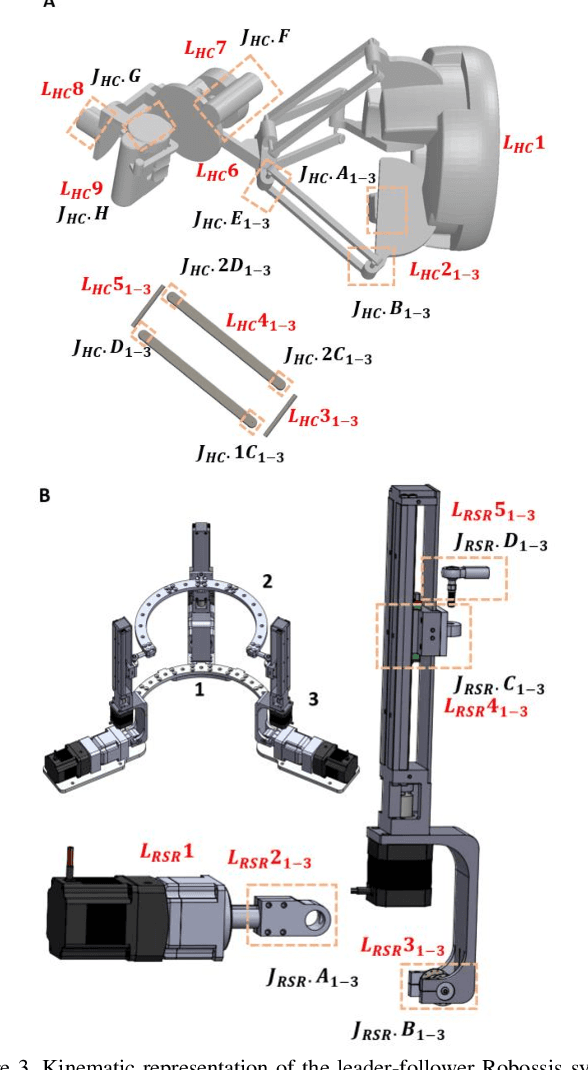
In this paper, we develop a virtual reality (VR) simulator for the Robossis robot-assisted femur fracture surgery. Due to the steep learning curve for such procedures, a VR simulator is essential for training surgeon(s) and staff. The Robossis Surgical Simulator (RSS) is designed to immerse user(s) in a realistic surgery setting using the Robossis system as completed in a previous real-world cadaveric procedure. The RSS is designed to interface the Sigma-7 Haptic Controller with the Robossis Surgical Robot (RSR) and the Meta Quest VR headset. Results show that the RSR follows user commands in 6 DOF and prevents the overlapping of bone segments. This development demonstrates a promising avenue for future implementation of the Robossis system.