 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsch Meets HRI: Human Conformity to Robot Groups
Aug 25, 2023
We present a research outline that aims at investigating group dynamics and peer pressure in the context of industrial robots. Our research plan was motivated by the fact that industrial robots became already an integral part of human-robot co-working. However, industrial robots have been sparsely integrated into research on robot credibility, group dynamics, and potential users' tendency to follow a robot's indication. Therefore, we aim to transfer the classic Asch experiment (see \cite{Asch_51}) into HRI with industrial robots. More precisely, we will test to what extent participants follow a robot's response when confronted with a group (vs. individual) industrial robot arms (vs. human) peers who give a false response. We are interested in highlighting the effects of group size, perceived robot credibility, psychological stress, and peer pressure in the context of industrial robots. With the results of this research, we hope to highlight group dynamics that might underlie HRI in industrial settings in which numerous robots already work closely together with humans in shared environments.
Trust and Cognitive Load During Human-Robot Interaction
Sep 11, 2019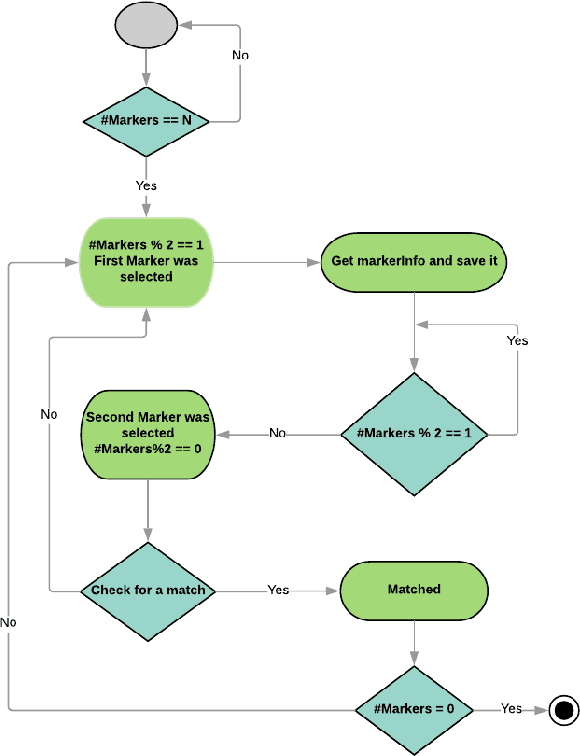
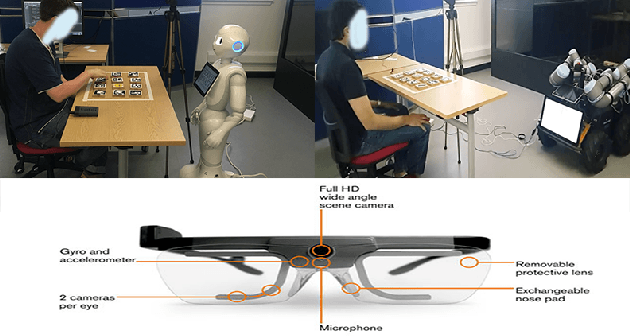
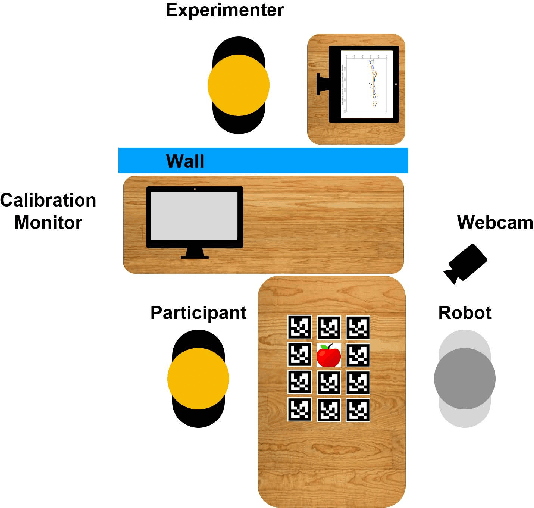
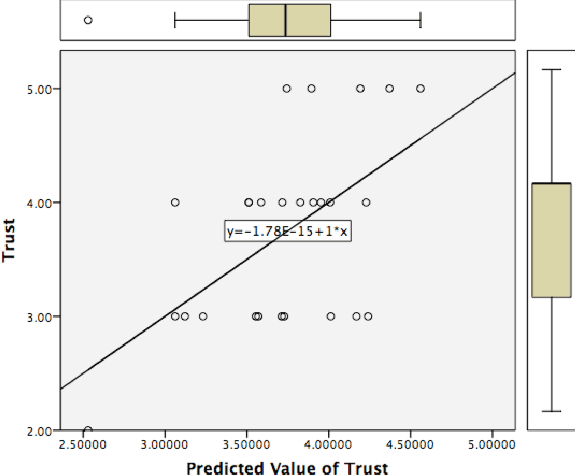
This paper presents an exploratory study to understand the relationship between a humans' cognitive load, trust, and anthropomorphism during human-robot interaction. To understand the relationship, we created a \say{Matching the Pair} game that participants could play collaboratively with one of two robot types, Husky or Pepper. The goal was to understand if humans would trust the robot as a teammate while being in the game-playing situation that demanded a high level of cognitive load. Using a humanoid vs. a technical robot, we also investigated the impact of physical anthropomorphism and we furthermore tested the impact of robot error rate on subsequent judgments and behavior. Our results showed that there was an inversely proportional relationship between trust and cognitive load, suggesting that as the amount of cognitive load increased in the participants, their ratings of trust decreased. We also found a triple interaction impact between robot-type, error-rate and participant's ratings of trust. We found that participants perceived Pepper to be more trustworthy in comparison with the Husky robot after playing the game with both robots under high error-rate condition. On the contrary, Husky was perceived as more trustworthy than Pepper when it was depicted as featuring a low error-rate. Our results are interesting and call further investigation of the impact of physical anthropomorphism in combination with variable error-rates of the robot.