 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNever say never: Exploring the effects of available knowledge on agent persuasiveness in controlled physiotherapy motivation dialogues
Feb 13, 2026Generative Social Agents (GSAs) are increasingly impacting human users through persuasive means. On the one hand, they might motivate users to pursue personal goals, such as healthier lifestyles. On the other hand, they are associated with potential risks like manipulation and deception, which are induced by limited control over probabilistic agent outputs. However, as GSAs manifest communicative patterns based on available knowledge, their behavior may be regulated through their access to such knowledge. Following this approach, we explored persuasive ChatGPT-generated messages in the context of human-robot physiotherapy motivation. We did so by comparing ChatGPT-generated responses to predefined inputs from a hypothetical physiotherapy patient. In Study 1, we qualitatively analyzed 13 ChatGPT-generated dialogue scripts with varying knowledge configurations regarding persuasive message characteristics. In Study 2, third-party observers (N = 27) rated a selection of these dialogues in terms of the agent's expressiveness, assertiveness, and persuasiveness. Our findings indicate that LLM-based GSAs can adapt assertive and expressive personality traits -- significantly enhancing perceived persuasiveness. Moreover, persuasiveness significantly benefited from the availability of information about the patients' age and past profession, mediated by perceived assertiveness and expressiveness. Contextual knowledge about physiotherapy benefits did not significantly impact persuasiveness, possibly because the LLM had inherent knowledge about such benefits even without explicit prompting. Overall, the study highlights the importance of empirically studying behavioral patterns of GSAs, specifically in terms of what information generative AI systems require for consistent and responsible communication.
Knowledge-Based Design Requirements for Generative Social Robots in Higher Education
Feb 13, 2026Generative social robots (GSRs) powered by large language models enable adaptive, conversational tutoring but also introduce risks such as hallucina-tions, overreliance, and privacy violations. Existing frameworks for educa-tional technologies and responsible AI primarily define desired behaviors, yet they rarely specify the knowledge prerequisites that enable generative systems to express these behaviors reliably. To address this gap, we adopt a knowledge-based design perspective and investigate what information tutor-ing-oriented GSRs require to function responsibly and effectively in higher education. Based on twelve semi-structured interviews with university stu-dents and lecturers, we identify twelve design requirements across three knowledge types: self-knowledge (assertive, conscientious and friendly per-sonality with customizable role), user-knowledge (personalized information about student learning goals, learning progress, motivation type, emotional state and background), and context-knowledge (learning materials, educa-tional strategies, course-related information, and physical learning environ-ment). By identifying these knowledge requirements, this work provides a structured foundation for the design of tutoring GSRs and future evaluations, aligning generative system capabilities with pedagogical and ethical expecta-tions.
Understanding Persuasive Interactions between Generative Social Agents and Humans: The Knowledge-based Persuasion Model (KPM)
Feb 12, 2026Generative social agents (GSAs) use artificial intelligence to autonomously communicate with human users in a natural and adaptive manner. Currently, there is a lack of theorizing regarding interactions with GSAs, and likewise, few guidelines exist for studying how they influence user attitudes and behaviors. Consequently, we propose the Knowledge-based Persuasion Model (KPM) as a novel theoretical framework. According to the KPM, a GSA's self, user, and context-related knowledge drives its persuasive behavior, which in turn shapes the attitudes and behaviors of a responding human user. By synthesizing existing research, the model offers a structured approach to studying interactions with GSAs, supporting the development of agents that motivate rather than manipulate humans. Accordingly, the KPM encourages the integration of responsible GSAs that adhere to social norms and ethical standards with the goal of increasing user wellbeing. Implications of the KPM for research and application domains such as healthcare and education are discussed.
Measuring Transparency in Intelligent Robots
Aug 29, 2024



As robots become increasingly integrated into our daily lives, the need to make them transparent has never been more critical. Yet, despite its importance in human-robot interaction, a standardized measure of robot transparency has been missing until now. This paper addresses this gap by presenting the first comprehensive scale to measure perceived transparency in robotic systems, available in English, German, and Italian languages. Our approach conceptualizes transparency as a multidimensional construct, encompassing explainability, legibility, predictability, and meta-understanding. The proposed scale was a product of a rigorous three-stage process involving 1,223 participants. Firstly, we generated the items of our scale, secondly, we conducted an exploratory factor analysis, and thirdly, a confirmatory factor analysis served to validate the factor structure of the newly developed TOROS scale. The final scale encompasses 26 items and comprises three factors: Illegibility, Explainability, and Predictability. TOROS demonstrates high cross-linguistic reliability, inter-factor correlation, model fit, internal consistency, and convergent validity across the three cross-national samples. This empirically validated tool enables the assessment of robot transparency and contributes to the theoretical understanding of this complex construct. By offering a standardized measure, we facilitate consistent and comparable research in human-robot interaction in which TOROS can serve as a benchmark.
Trust and Cognitive Load During Human-Robot Interaction
Sep 11, 2019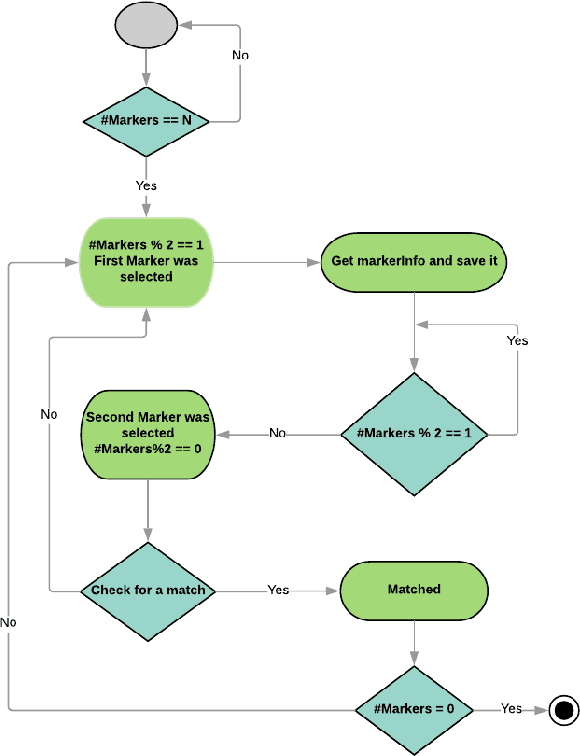
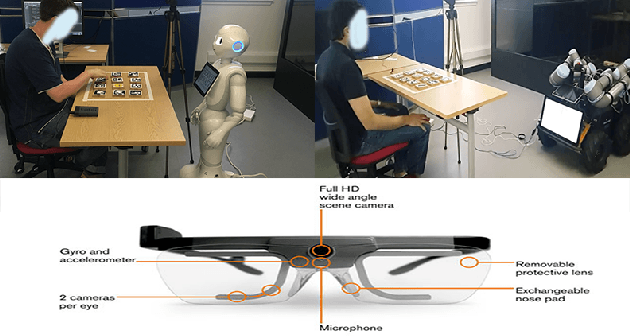
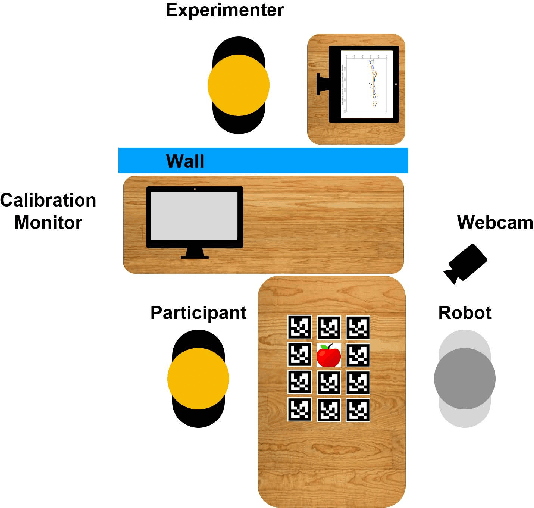
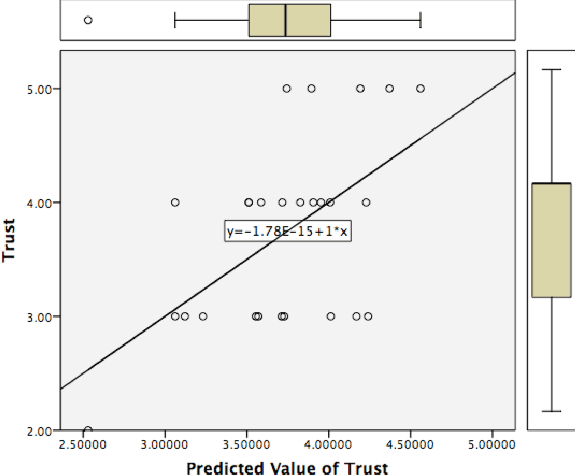
This paper presents an exploratory study to understand the relationship between a humans' cognitive load, trust, and anthropomorphism during human-robot interaction. To understand the relationship, we created a \say{Matching the Pair} game that participants could play collaboratively with one of two robot types, Husky or Pepper. The goal was to understand if humans would trust the robot as a teammate while being in the game-playing situation that demanded a high level of cognitive load. Using a humanoid vs. a technical robot, we also investigated the impact of physical anthropomorphism and we furthermore tested the impact of robot error rate on subsequent judgments and behavior. Our results showed that there was an inversely proportional relationship between trust and cognitive load, suggesting that as the amount of cognitive load increased in the participants, their ratings of trust decreased. We also found a triple interaction impact between robot-type, error-rate and participant's ratings of trust. We found that participants perceived Pepper to be more trustworthy in comparison with the Husky robot after playing the game with both robots under high error-rate condition. On the contrary, Husky was perceived as more trustworthy than Pepper when it was depicted as featuring a low error-rate. Our results are interesting and call further investigation of the impact of physical anthropomorphism in combination with variable error-rates of the robot.