 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLDFA: Latent Diffusion Face Anonymization for Self-driving Applications
Feb 17, 2023



In order to protect vulnerable road users (VRUs), such as pedestrians or cyclists, it is essential that intelligent transportation systems (ITS) accurately identify them. Therefore, datasets used to train perception models of ITS must contain a significant number of vulnerable road users. However, data protection regulations require that individuals are anonymized in such datasets. In this work, we introduce a novel deep learning-based pipeline for face anonymization in the context of ITS. In contrast to related methods, we do not use generative adversarial networks (GANs) but build upon recent advances in diffusion models. We propose a two-stage method, which contains a face detection model followed by a latent diffusion model to generate realistic face in-paintings. To demonstrate the versatility of anonymized images, we train segmentation methods on anonymized data and evaluate them on non-anonymized data. Our experiment reveal that our pipeline is better suited to anonymize data for segmentation than naive methods and performes comparably with recent GAN-based methods. Moreover, face detectors achieve higher mAP scores for faces anonymized by our method compared to naive or recent GAN-based methods.
An Approach to Vehicle Trajectory Prediction Using Automatically Generated Traffic Maps
Jun 14, 2018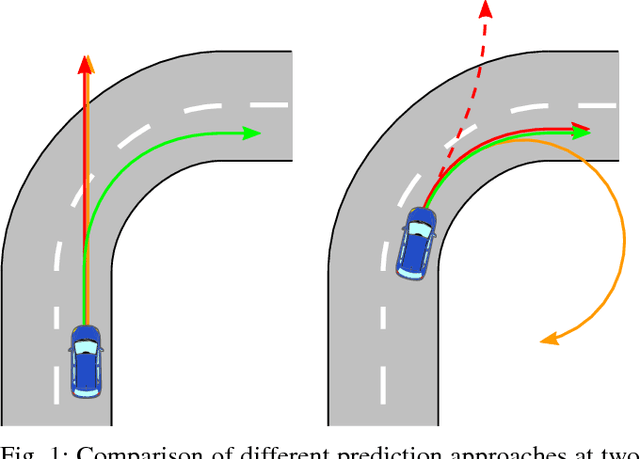
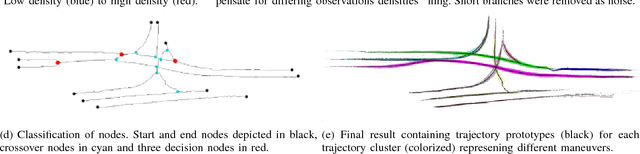
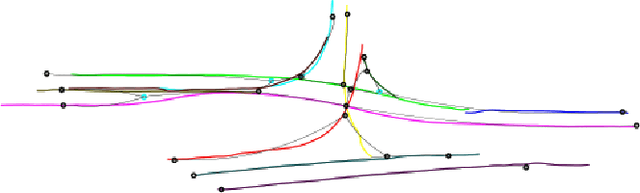
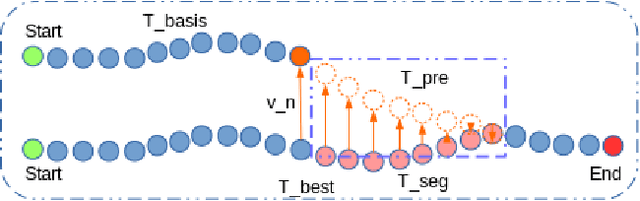
Trajectory and intention prediction of traffic participants is an important task in automated driving and crucial for safe interaction with the environment. In this paper, we present a new approach to vehicle trajectory prediction based on automatically generated maps containing statistical information about the behavior of traffic participants in a given area. These maps are generated based on trajectory observations using image processing and map matching techniques and contain all typical vehicle movements and probabilities in the considered area. Our prediction approach matches an observed trajectory to a behavior contained in the map and uses this information to generate a prediction. We evaluated our approach on a dataset containing over 14000 trajectories and found that it produces significantly more precise mid-term predictions compared to motion model-based prediction approaches.