 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Servoing for Robotic On-Orbit Servicing: A Survey
Sep 03, 2024

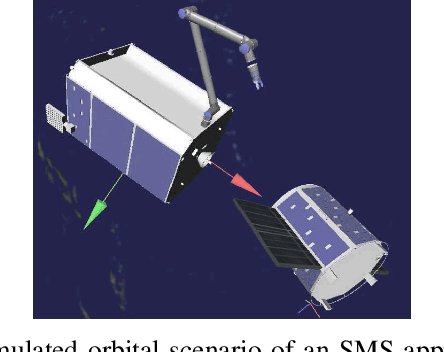

On-orbit servicing (OOS) activities will power the next big step for sustainable exploration and commercialization of space. Developing robotic capabilities for autonomous OOS operations is a priority for the space industry. Visual Servoing (VS) enables robots to achieve the precise manoeuvres needed for critical OOS missions by utilizing visual information for motion control. This article presents an overview of existing VS approaches for autonomous OOS operations with space manipulator systems (SMS). We divide the approaches according to their contribution to the typical phases of a robotic OOS mission: a) Recognition, b) Approach, and c) Contact. We also present a discussion on the reviewed VS approaches, identifying current trends. Finally, we highlight the challenges and areas for future research on VS techniques for robotic OOS.
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
May 30, 2024Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
GraspLDM: Generative 6-DoF Grasp Synthesis using Latent Diffusion Models
Dec 18, 2023



Vision-based grasping of unknown objects in unstructured environments is a key challenge for autonomous robotic manipulation. A practical grasp synthesis system is required to generate a diverse set of 6-DoF grasps from which a task-relevant grasp can be executed. Although generative models are suitable for learning such complex data distributions, existing models have limitations in grasp quality, long training times, and a lack of flexibility for task-specific generation. In this work, we present GraspLDM- a modular generative framework for 6-DoF grasp synthesis that uses diffusion models as priors in the latent space of a VAE. GraspLDM learns a generative model of object-centric $SE(3)$ grasp poses conditioned on point clouds. GraspLDM's architecture enables us to train task-specific models efficiently by only re-training a small de-noising network in the low-dimensional latent space, as opposed to existing models that need expensive re-training. Our framework provides robust and scalable models on both full and single-view point clouds. GraspLDM models trained with simulation data transfer well to the real world and provide an 80\% success rate for 80 grasp attempts of diverse test objects, improving over existing generative models. We make our implementation available at https://github.com/kuldeepbrd1/graspldm .