 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrop Height and Plot Estimation from Unmanned Aerial Vehicles using 3D LiDAR
Oct 30, 2019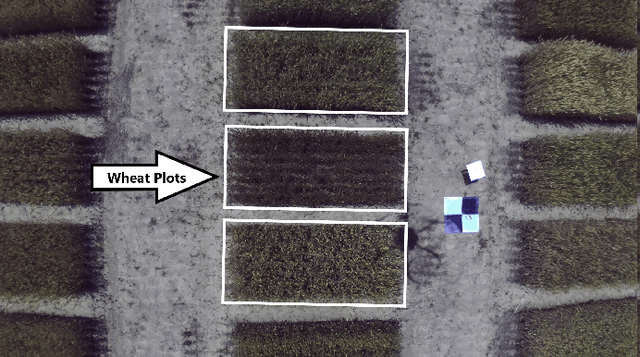



In this paper, we present techniques to measure crop heights using a 3D LiDAR mounted on an Unmanned Aerial Vehicle (UAV). Knowing the height of plants is crucial to monitor their overall health and growth cycles, especially for high-throughput plant phenotyping. We present a methodology for extracting plant heights from 3D LiDAR point clouds, specifically focusing on row-crop environments. The key steps in our algorithm are clustering of LiDAR points to semi-automatically detect plots, local ground plane estimation, and height estimation. The plot detection uses a k--means clustering algorithm followed by a voting scheme to find the bounding boxes of individual plots. We conducted a series of experiments in controlled and natural settings. Our algorithm was able to estimate the plant heights in a field with 112 plots within +-5.36%. This is the first such dataset for 3D LiDAR from an airborne robot over a wheat field. The developed code can be found on the GitHub repository located at https://github.com/hsd1121/PointCloudProcessing.