 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAtlas: End-to-End 3D Scene Reconstruction from Posed Images
Mar 23, 2020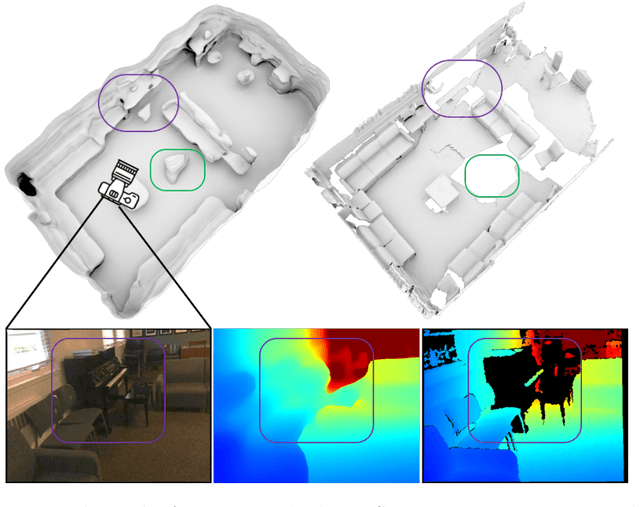
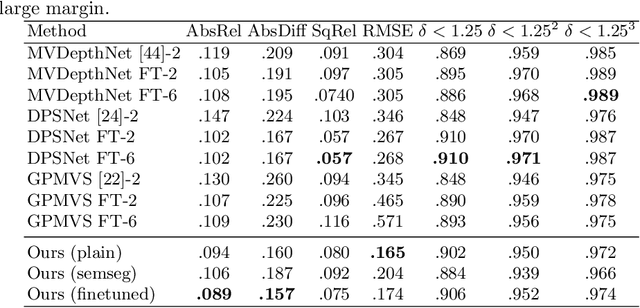
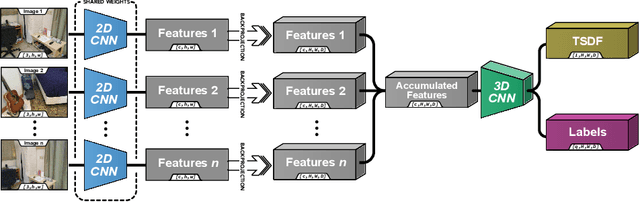
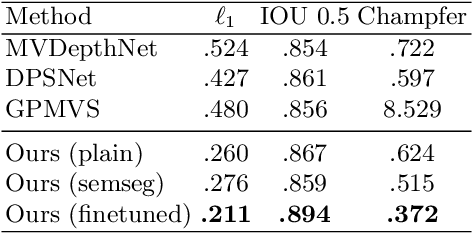
We present an end-to-end 3D reconstruction method for a scene by directly regressing a truncated signed distance function (TSDF) from a set of posed RGB images. Traditional approaches to 3D reconstruction rely on an intermediate representation of depth maps prior to estimating a full 3D model of a scene. We hypothesize that a direct regression to 3D is more effective. A 2D CNN extracts features from each image independently which are then back-projected and accumulated into a voxel volume using the camera intrinsics and extrinsics. After accumulation, a 3D CNN refines the accumulated features and predicts the TSDF values. Additionally, semantic segmentation of the 3D model is obtained without significant computation. This approach is evaluated on the Scannet dataset where we significantly outperform state-of-the-art baselines (deep multiview stereo followed by traditional TSDF fusion) both quantitatively and qualitatively. We compare our 3D semantic segmentation to prior methods that use a depth sensor since no previous work attempts the problem with only RGB input.
Depth Estimation by Learning Triangulation and Densification of Sparse Points for Multi-view Stereo
Mar 19, 2020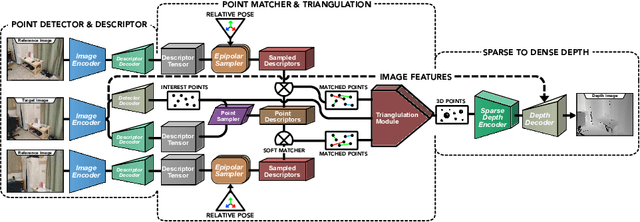
Multi-view stereo (MVS) is the golden mean between the accuracy of active depth sensing and the practicality of monocular depth estimation. Cost volume based approaches employing 3D convolutional neural networks (CNNs) have considerably improved the accuracy of MVS systems. However, this accuracy comes at a high computational cost which impedes practical adoption. Distinct from cost volume approaches, we propose an efficient depth estimation approach by first (a) detecting and evaluating descriptors for interest points, then (b) learning to match and triangulate a small set of interest points, and finally (c) densifying this sparse set of 3D points using CNNs. An end-to-end network efficiently performs all three steps within a deep learning framework and trained with intermediate 2D image and 3D geometric supervision, along with depth supervision. Crucially, our first step complements pose estimation using interest point detection and descriptor learning. We demonstrate that state-of-the-art results on depth estimation with lower compute for different scene lengths. Furthermore, our method generalizes to newer environments and the descriptors output by our network compare favorably to strong baselines.