 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHILL at SemEval-2025 Task 2: You Can't Just Throw Entities and Hope -- Make Your LLM to Get Them Right
Jun 16, 2025In this paper, we describe our approach for the SemEval 2025 Task 2 on Entity-Aware Machine Translation (EA-MT). Our system aims to improve the accuracy of translating named entities by combining two key approaches: Retrieval Augmented Generation (RAG) and iterative self-refinement techniques using Large Language Models (LLMs). A distinctive feature of our system is its self-evaluation mechanism, where the LLM assesses its own translations based on two key criteria: the accuracy of entity translations and overall translation quality. We demonstrate how these methods work together and effectively improve entity handling while maintaining high-quality translations.
SPARKLE: Enhancing SPARQL Generation with Direct KG Integration in Decoding
Jun 29, 2024



Existing KBQA methods have traditionally relied on multi-stage methodologies, involving tasks such as entity linking, subgraph retrieval and query structure generation. However, multi-stage approaches are dependent on the accuracy of preceding steps, leading to cascading errors and increased inference time. Although a few studies have explored the use of end-to-end models, they often suffer from lower accuracy and generate inoperative query that is not supported by the underlying data. Furthermore, most prior approaches are limited to the static training data, potentially overlooking the evolving nature of knowledge bases over time. To address these challenges, we present a novel end-to-end natural language to SPARQL framework, SPARKLE. Notably SPARKLE leverages the structure of knowledge base directly during the decoding, effectively integrating knowledge into the query generation. Our study reveals that simply referencing knowledge base during inference significantly reduces the occurrence of inexecutable query generations. SPARKLE achieves new state-of-the-art results on SimpleQuestions-Wiki and highest F1 score on LCQuAD 1.0 (among models not using gold entities), while getting slightly lower result on the WebQSP dataset. Finally, we demonstrate SPARKLE's fast inference speed and its ability to adapt when the knowledge base differs between the training and inference stages.
Dirichlet process approach for radio-based simultaneous localization and mapping
Jul 02, 2021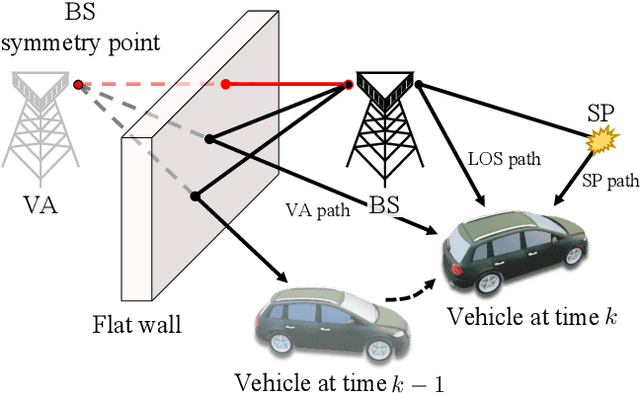

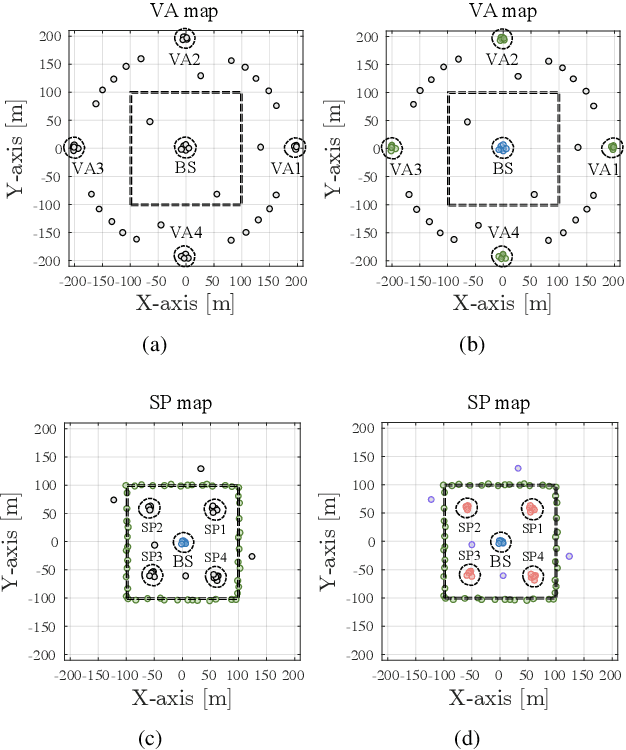
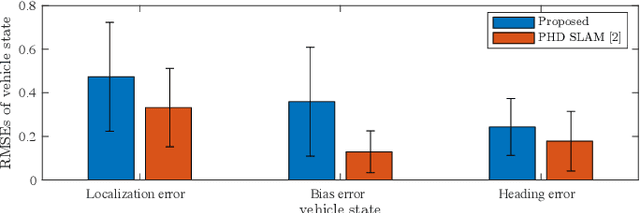
Due to 5G millimeter wave (mmWave), spatial channel parameters are becoming highly resolvable, enabling accurate vehicle localization and mapping. We propose a novel method of radio simultaneous localization and mapping (SLAM) with the Dirichlet process (DP). The DP, which can estimate the number of clusters as well as clustering, is capable of identifying the locations of reflectors by classifying signals when such 5G signals are reflected and received from various objects. We generate birth points using the measurements from 5G mmWave signals received by the vehicle and classify objects by clustering birth points generated over time. Each time we use the DP clustering method, we can map landmarks in the environment in challenging situations where false alarms exist in the measurements and change the cardinality of received signals. Simulation results demonstrate the performance of the proposed scheme. By comparing the results with the SLAM based on the Rao-Blackwellized probability hypothesis density filter, we confirm a slight drop in SLAM performance, but as a result, we validate that it has a significant gain in computational complexity.
Cooperative mmWave PHD-SLAM with Moving Scatterers
Jun 23, 2021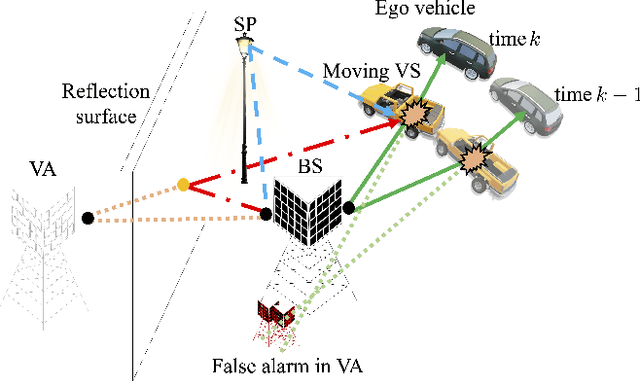
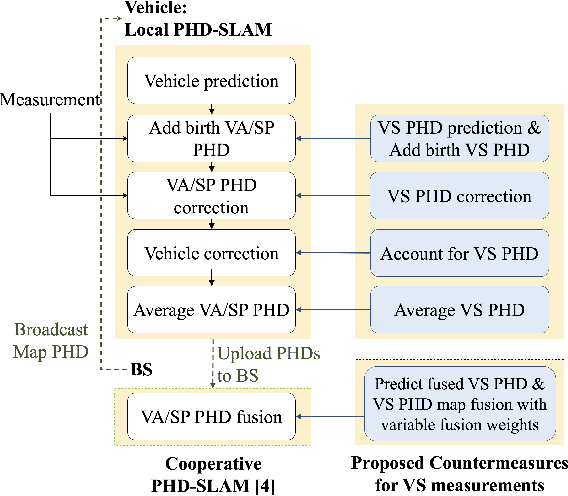
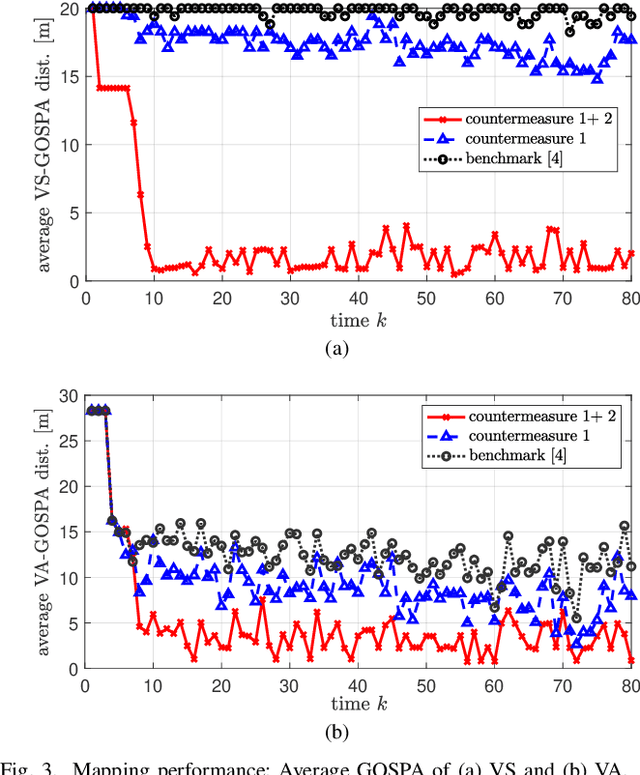
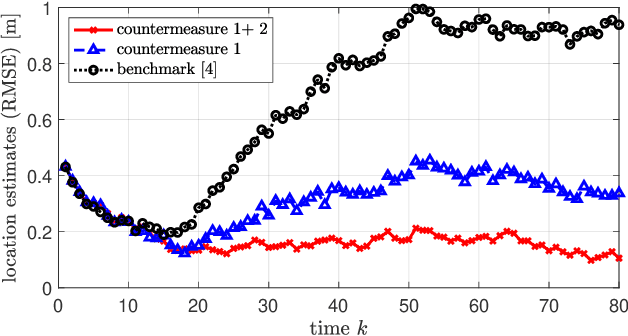
Using the multiple-model (MM) probability hypothesis density (PHD) filter, millimeter wave (mmWave) radio simultaneous localization and mapping (SLAM) in vehicular scenarios is susceptible to movements of objects, in particular vehicles driving in parallel with the ego vehicle. We propose and evaluate two countermeasures to track vehicle scatterers (VSs) in mmWave radio MM-PHD-SLAM. First, locally at each vehicle, we generate and treat the VS map PHD in the context of Bayesian recursion, and modify vehicle state correction with the VS map PHD. Second, in the global map fusion process at the base station, we average the VS map PHD and upload it with self-vehicle posterior density, compute fusion weights, and prune the target with low Gaussian weight in the context of arithmetic average-based map fusion. From simulation results, the proposed cooperative mmWave radio MM-PHD-SLAM filter is shown to outperform the previous filter in VS scenarios.