 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative mmWave PHD-SLAM with Moving Scatterers
Paper and Code
Jun 23, 2021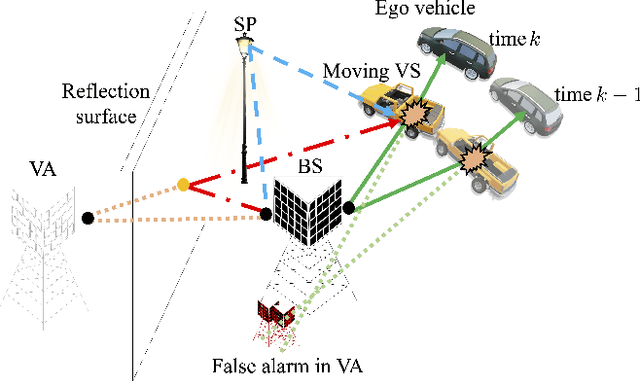
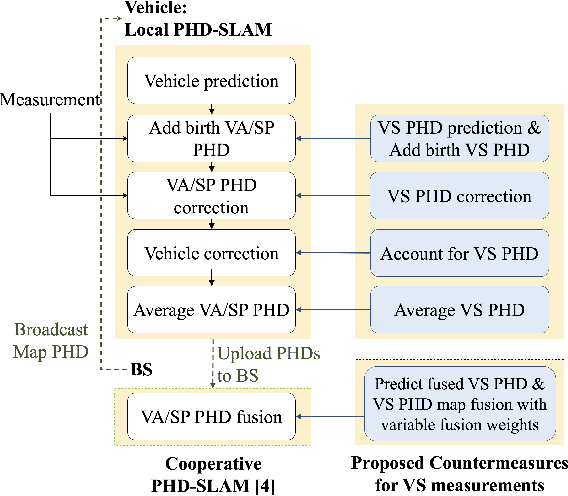
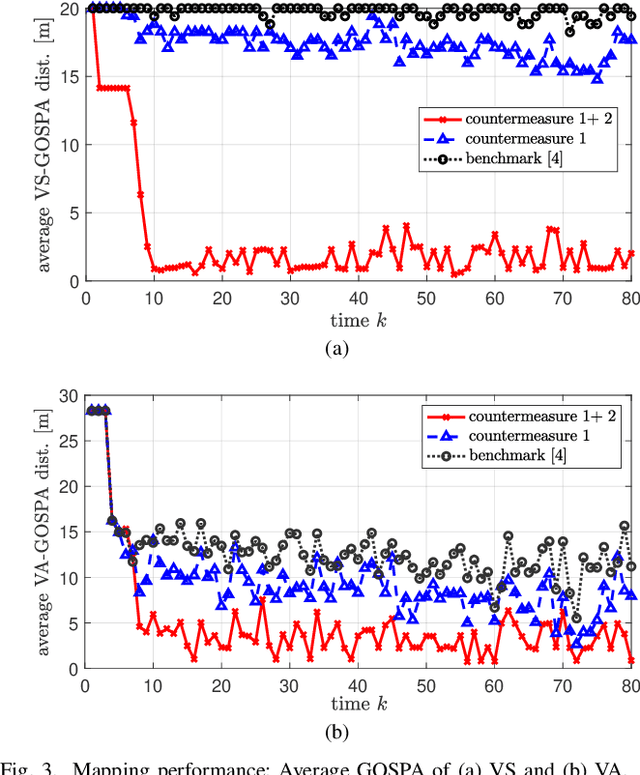
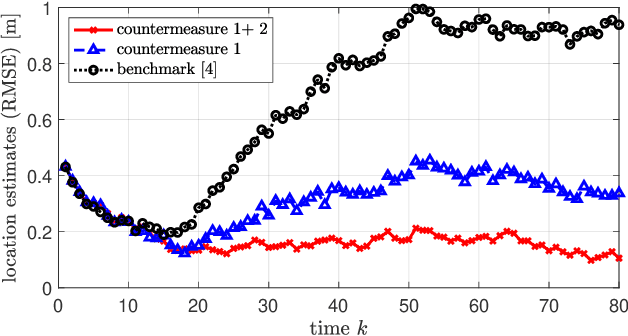
Using the multiple-model (MM) probability hypothesis density (PHD) filter, millimeter wave (mmWave) radio simultaneous localization and mapping (SLAM) in vehicular scenarios is susceptible to movements of objects, in particular vehicles driving in parallel with the ego vehicle. We propose and evaluate two countermeasures to track vehicle scatterers (VSs) in mmWave radio MM-PHD-SLAM. First, locally at each vehicle, we generate and treat the VS map PHD in the context of Bayesian recursion, and modify vehicle state correction with the VS map PHD. Second, in the global map fusion process at the base station, we average the VS map PHD and upload it with self-vehicle posterior density, compute fusion weights, and prune the target with low Gaussian weight in the context of arithmetic average-based map fusion. From simulation results, the proposed cooperative mmWave radio MM-PHD-SLAM filter is shown to outperform the previous filter in VS scenarios.