 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff the Beaten Track: Laterally Weighted Motion Planning for Local Obstacle Avoidance
Sep 17, 2023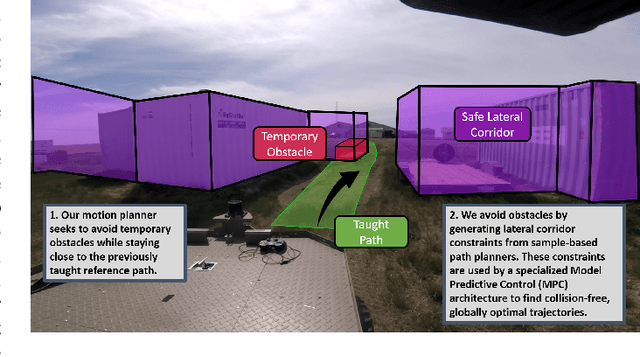
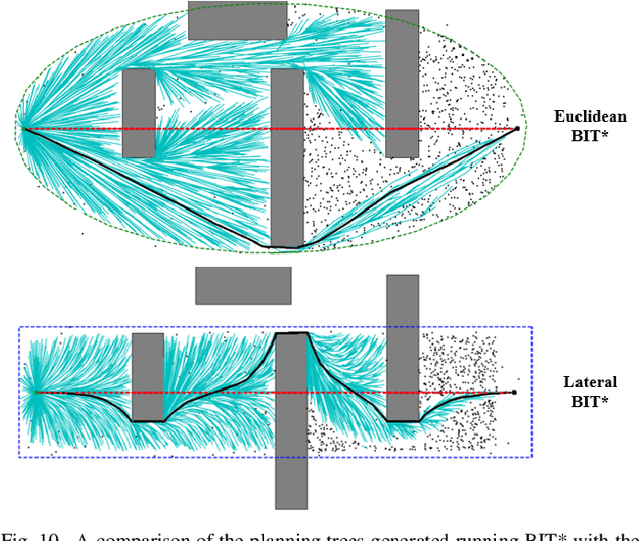
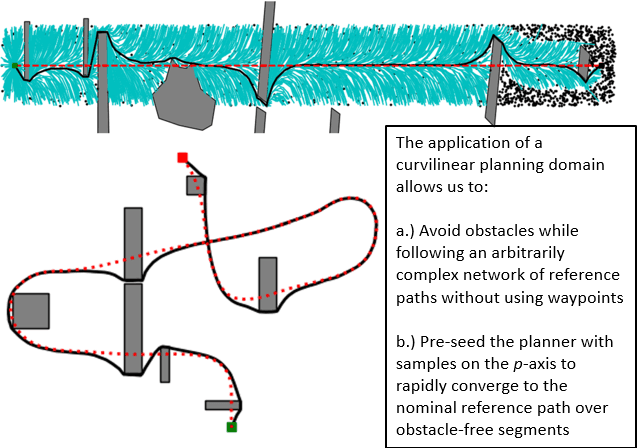
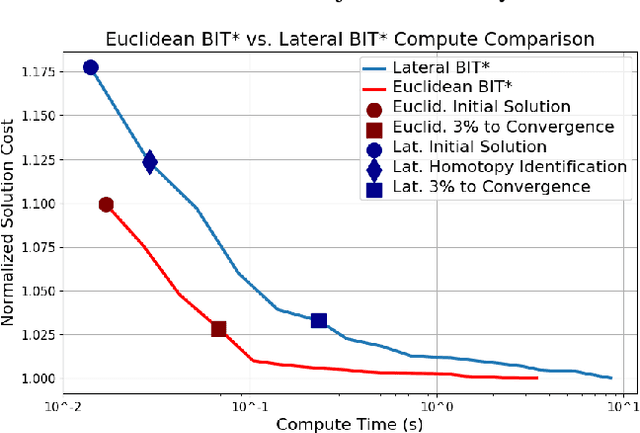
We extend the behaviour of generic sample-based motion planners to support obstacle avoidance during long-range path following by introducing a new edge-cost metric paired with a curvilinear planning space. The resulting planner generates naturally smooth paths that avoid local obstacles while minimizing lateral path deviation to best exploit prior terrain knowledge from the reference path. In this adaptation, we explore the nuances of planning in the curvilinear configuration space and describe a mechanism for natural singularity handling to improve generality. We then shift our focus to the trajectory generation problem, proposing a novel Model Predictive Control (MPC) architecture to best exploit our path planner for improved obstacle avoidance. Through rigorous field robotics trials over 5 km, we compare our approach to the more common direct path-tracking MPC method and discuss the promise of these techniques for reliable long-term autonomous operations.
Neural Network Based Lidar Gesture Recognition for Realtime Robot Teleoperation
Sep 17, 2021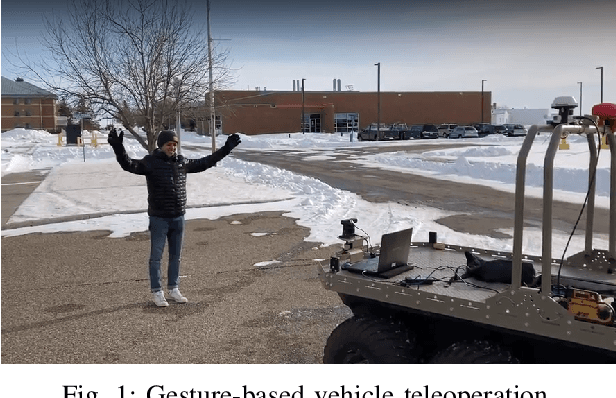
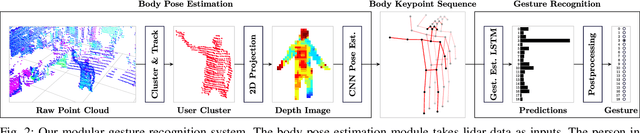
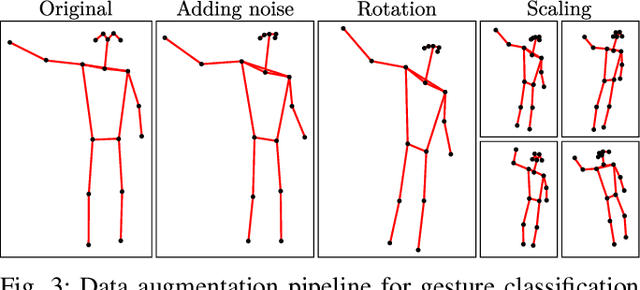
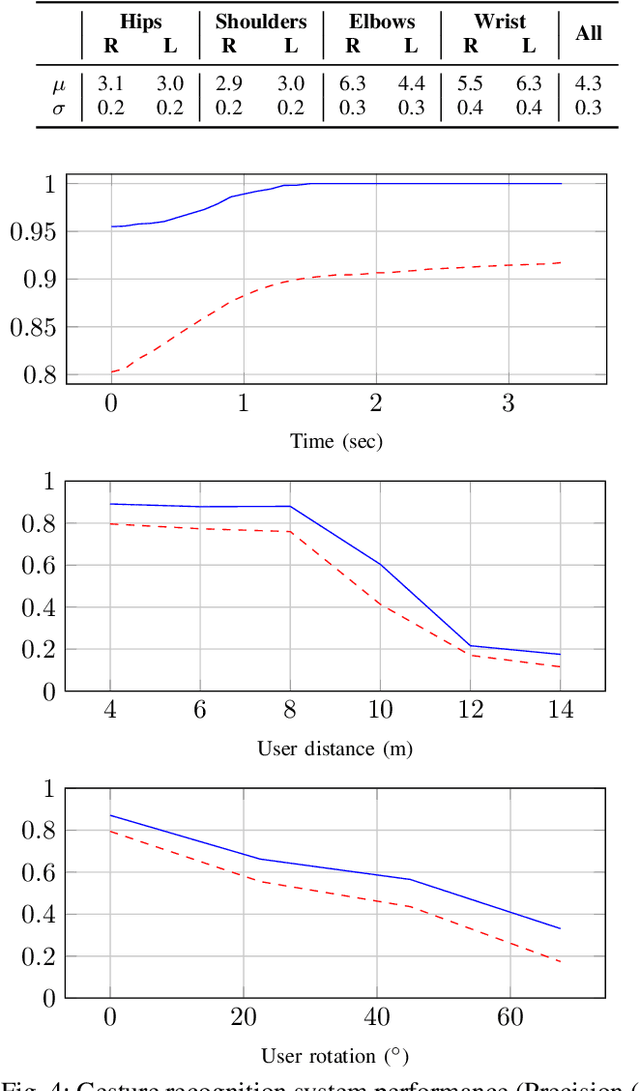
We propose a novel low-complexity lidar gesture recognition system for mobile robot control robust to gesture variation. Our system uses a modular approach, consisting of a pose estimation module and a gesture classifier. Pose estimates are predicted from lidar scans using a Convolutional Neural Network trained using an existing stereo-based pose estimation system. Gesture classification is accomplished using a Long Short-Term Memory network and uses a sequence of estimated body poses as input to predict a gesture. Breaking down the pipeline into two modules reduces the dimensionality of the input, which could be lidar scans, stereo imagery, or any other modality from which body keypoints can be extracted, making our system lightweight and suitable for mobile robot control with limited computing power. The use of lidar contributes to the robustness of the system, allowing it to operate in most outdoor conditions, to be independent of lighting conditions, and for input to be detected 360 degrees around the robot. The lidar-based pose estimator and gesture classifier use data augmentation and automated labeling techniques, requiring a minimal amount of data collection and avoiding the need for manual labeling. We report experimental results for each module of our system and demonstrate its effectiveness by testing it in a real-world robot teleoperation setting.
There's No Place Like Home: Visual Teach and Repeat for Emergency Return of Multirotor UAVs During GPS Failure
Sep 15, 2018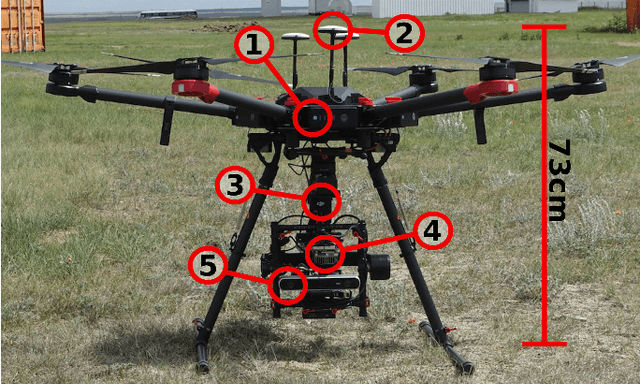
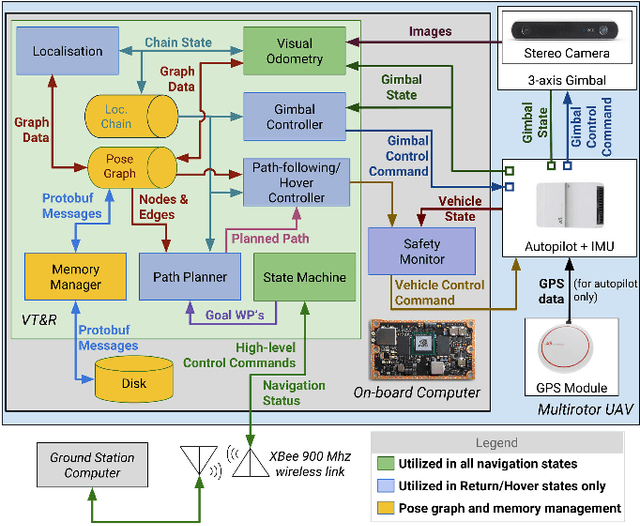
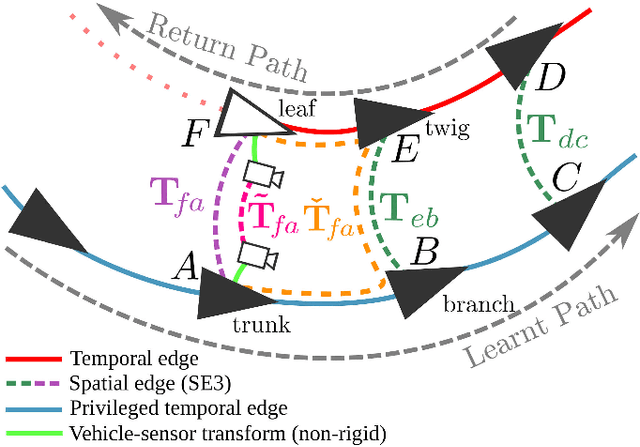
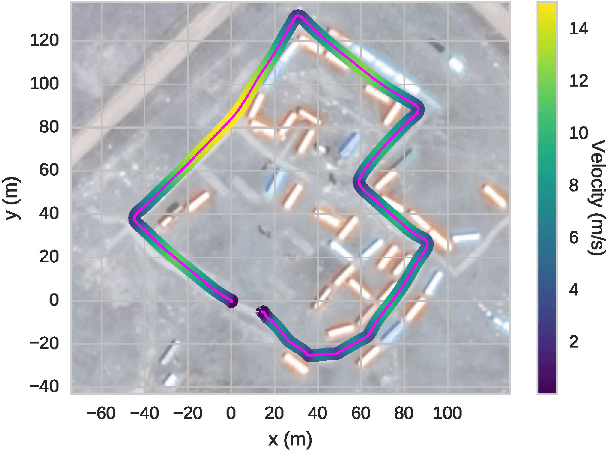
Redundant navigation systems are critical for safe operation of UAVs in high-risk environments. Since most commercial UAVs almost wholly rely on GPS, jamming, interference and multi-pathing are real concerns that usually limit their operations to low-risk environments and Visual Line-Of-Sight. This paper presents a vision-based route-following system for the autonomous, safe return of UAVs under primary navigation failure such as GPS jamming. Using a Visual Teach & Repeat framework to build a visual map of the environment during an outbound flight, we show the autonomous return of the UAV by visually localising the live view to this map when a simulated GPS failure occurs, controlling the vehicle to follow the safe outbound path back to the launch point. Using gimbal-stabilised stereo vision alone, without reliance on external infrastructure or inertial sensing, visual odometry and localisation are achieved at altitudes of 5-25 m and flight speeds up to 55 km/h. We examine the performance of the visual localisation algorithm under a variety of conditions and also demonstrate closed-loop autonomy along a complicated 450 m path.