 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChange of Scenery: Unsupervised LiDAR Change Detection for Mobile Robots
Sep 19, 2023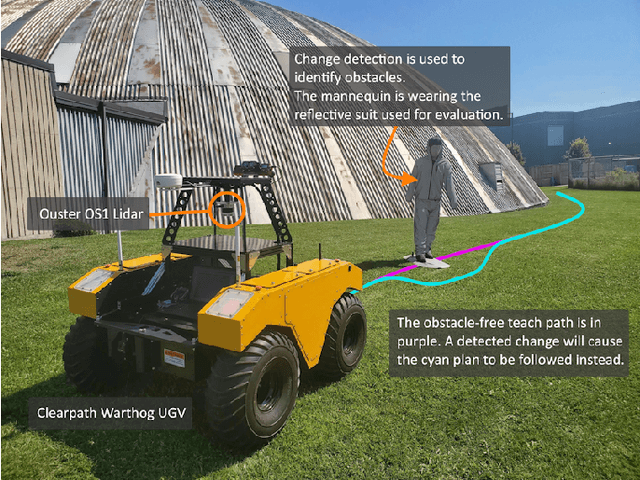

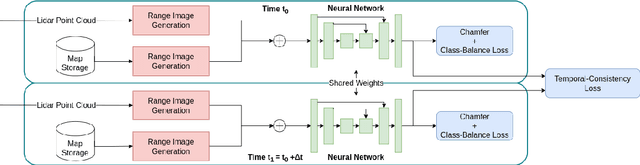
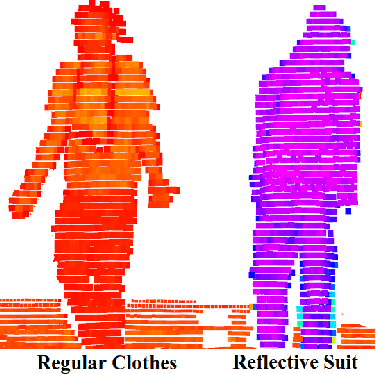
This paper presents a fully unsupervised deep change detection approach for mobile robots with 3D LiDAR. In unstructured environments, it is infeasible to define a closed set of semantic classes. Instead, semantic segmentation is reformulated as binary change detection. We develop a neural network, RangeNetCD, that uses an existing point-cloud map and a live LiDAR scan to detect scene changes with respect to the map. Using a novel loss function, existing point-cloud semantic segmentation networks can be trained to perform change detection without any labels or assumptions about local semantics. We demonstrate the performance of this approach on data from challenging terrains; mean intersection over union (mIoU) scores range between 67.4% and 82.2% depending on the amount of environmental structure. This outperforms the geometric baseline used in all experiments. The neural network runs faster than 10Hz and is integrated into a robot's autonomy stack to allow safe navigation around obstacles that intersect the planned path. In addition, a novel method for the rapid automated acquisition of per-point ground-truth labels is described. Covering changed parts of the scene with retroreflective materials and applying a threshold filter to the intensity channel of the LiDAR allows for quantitative evaluation of the change detector.
Off the Beaten Track: Laterally Weighted Motion Planning for Local Obstacle Avoidance
Sep 17, 2023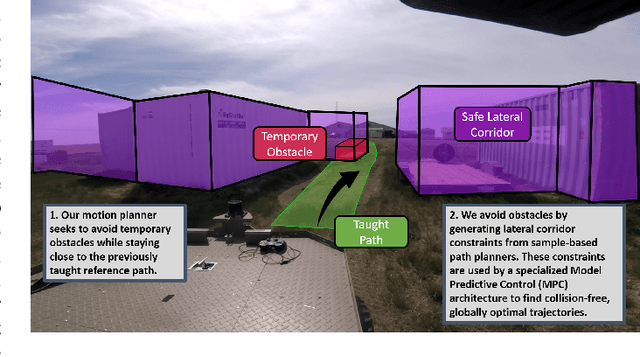
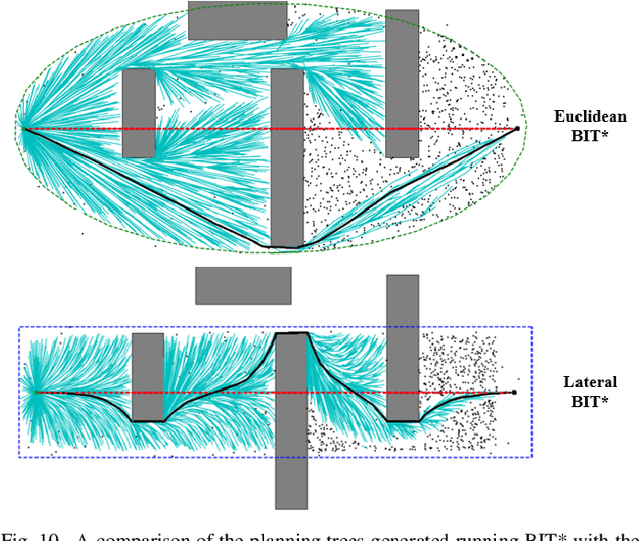
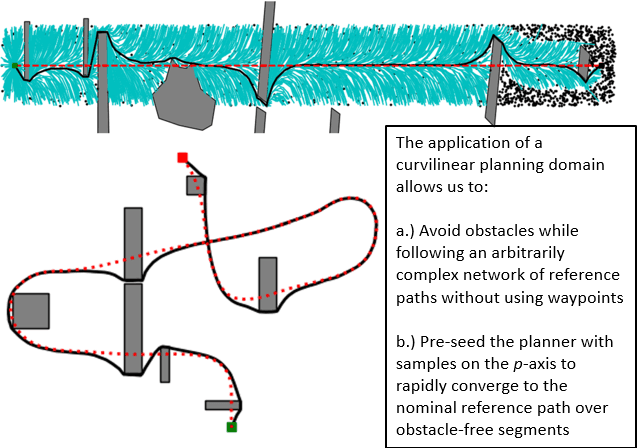
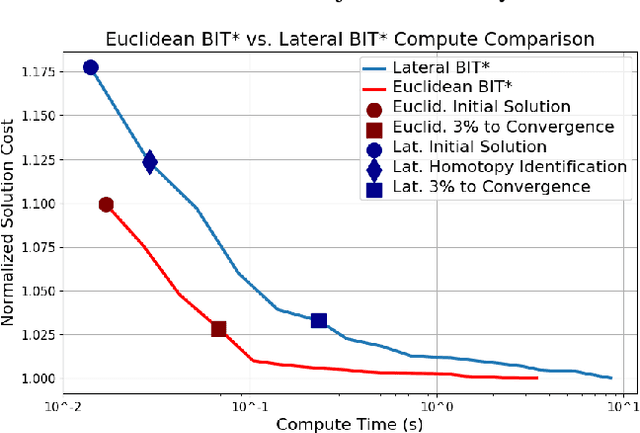
We extend the behaviour of generic sample-based motion planners to support obstacle avoidance during long-range path following by introducing a new edge-cost metric paired with a curvilinear planning space. The resulting planner generates naturally smooth paths that avoid local obstacles while minimizing lateral path deviation to best exploit prior terrain knowledge from the reference path. In this adaptation, we explore the nuances of planning in the curvilinear configuration space and describe a mechanism for natural singularity handling to improve generality. We then shift our focus to the trajectory generation problem, proposing a novel Model Predictive Control (MPC) architecture to best exploit our path planner for improved obstacle avoidance. Through rigorous field robotics trials over 5 km, we compare our approach to the more common direct path-tracking MPC method and discuss the promise of these techniques for reliable long-term autonomous operations.
Along Similar Lines: Local Obstacle Avoidance for Long-term Autonomous Path Following
Nov 03, 2022



Visual Teach and Repeat 3 (VT&R3), a generalization of stereo VT&R, achieves long-term autonomous path-following using topometric mapping and localization from a single rich sensor stream. In this paper, we improve the capabilities of a LiDAR implementation of VT&R3 to reliably detect and avoid obstacles in changing environments. Our architecture simplifies the obstacle-perception problem to that of place-dependent change detection. We then extend the behaviour of generic sample-based motion planners to better suit the teach-and-repeat problem structure by introducing a new edge-cost metric paired with a curvilinear planning space. The resulting planner generates naturally smooth paths that avoid local obstacles while minimizing lateral path deviation to best exploit prior terrain knowledge. While we use the method with VT&R, it can be generalized to suit arbitrary path-following applications. Experimental results from online run-time analysis, unit testing, and qualitative experiments on a differential drive robot show the promise of the technique for reliable long-term autonomous operation in complex unstructured environments.