 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Shot Clothing Category Recognition in Free-Configurations with Application to Autonomous Clothes Sorting
Jul 22, 2017
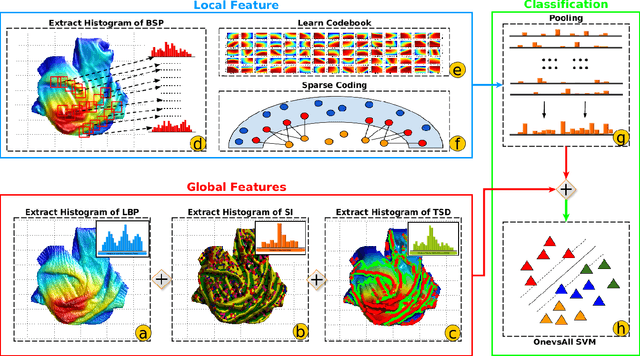


This paper proposes a single-shot approach for recognising clothing categories from 2.5D features. We propose two visual features, BSP (B-Spline Patch) and TSD (Topology Spatial Distances) for this task. The local BSP features are encoded by LLC (Locality-constrained Linear Coding) and fused with three different global features. Our visual feature is robust to deformable shapes and our approach is able to recognise the category of unknown clothing in unconstrained and random configurations. We integrated the category recognition pipeline with a stereo vision system, clothing instance detection, and dual-arm manipulators to achieve an autonomous sorting system. To verify the performance of our proposed method, we build a high-resolution RGBD clothing dataset of 50 clothing items of 5 categories sampled in random configurations (a total of 2,100 clothing samples). Experimental results show that our approach is able to reach 83.2\% accuracy while classifying clothing items which were previously unseen during training. This advances beyond the previous state-of-the-art by 36.2\%. Finally, we evaluate the proposed approach in an autonomous robot sorting system, in which the robot recognises a clothing item from an unconstrained pile, grasps it, and sorts it into a box according to its category. Our proposed sorting system achieves reasonable sorting success rates with single-shot perception.
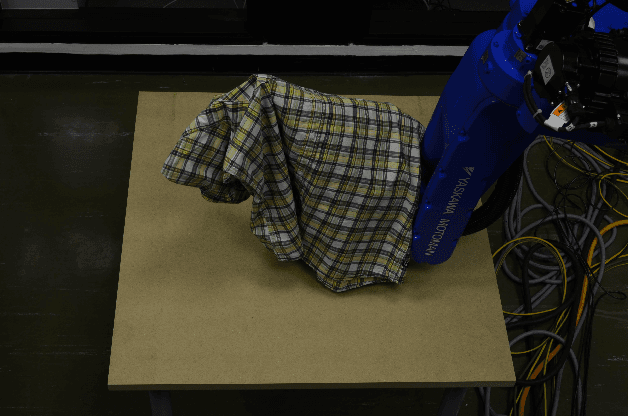
Robot Vision Architecture for Autonomous Clothes Manipulation
Oct 18, 2016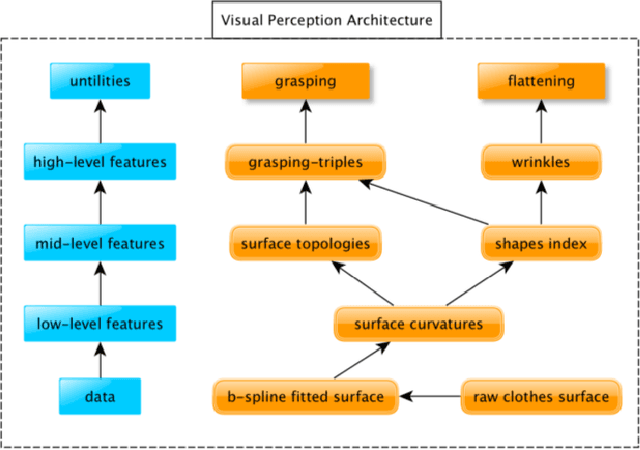

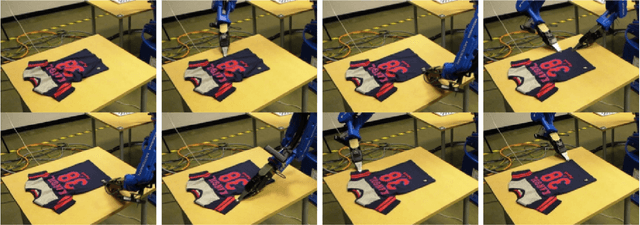

This paper presents a novel robot vision architecture for perceiving generic 3D clothes configurations. Our architecture is hierarchically structured, starting from low-level curvatures, across mid-level geometric shapes \& topology descriptions; and finally approaching high-level semantic surface structure descriptions. We demonstrate our robot vision architecture in a customised dual-arm industrial robot with our self-designed, off-the-self stereo vision system, carrying out autonomous grasping and dual-arm flattening. It is worth noting that the proposed dual-arm flattening approach is unique among the state-of-the-art robot autonomous system, which is the major contribution of this paper. The experimental results show that the proposed dual-arm flattening using stereo vision system remarkably outperforms the single-arm flattening and widely-cited Kinect-based sensing system for dexterous manipulation tasks. In addition, the proposed grasping approach achieves satisfactory performance on grasping various kind of garments, verifying the capability of proposed visual perception architecture to be adapted to more than one clothing manipulation tasks.
Glasgow's Stereo Image Database of Garments
Nov 28, 2013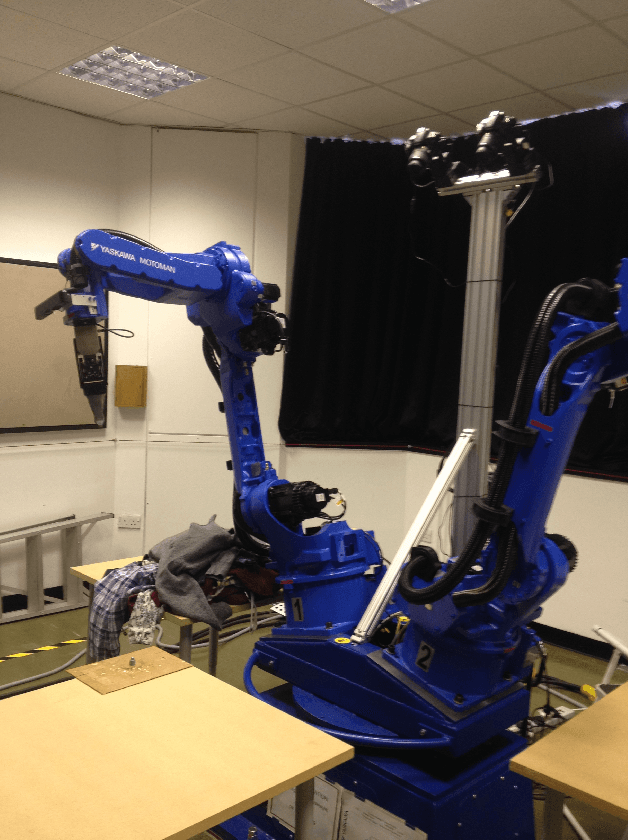

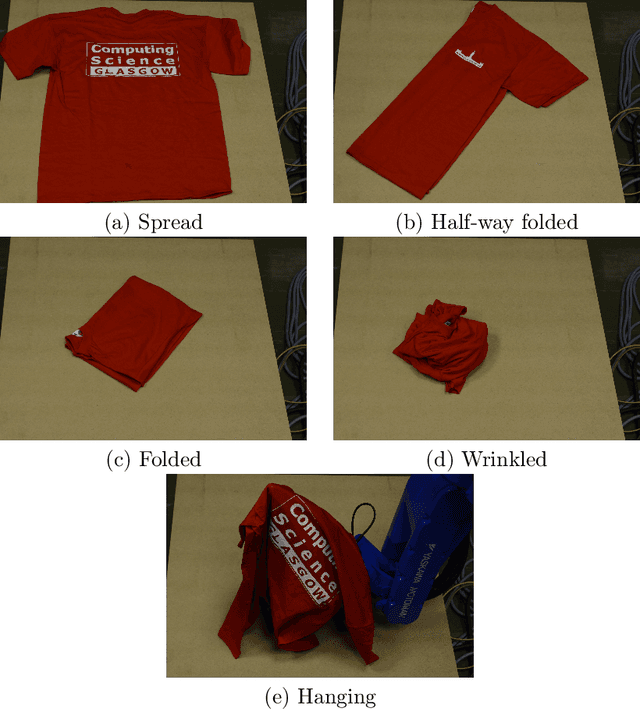
To provide insight into cloth perception and manipulation with an active binocular robotic vision system, we compiled a database of 80 stereo-pair colour images with corresponding horizontal and vertical disparity maps and mask annotations, for 3D garment point cloud rendering has been created and released. The stereo-image garment database is part of research conducted under the EU-FP7 Clothes Perception and Manipulation (CloPeMa) project and belongs to a wider database collection released through CloPeMa (www.clopema.eu). This database is based on 16 different off-the-shelve garments. Each garment has been imaged in five different pose configurations on the project's binocular robot head. A full copy of the database is made available for scientific research only at https://sites.google.com/site/ugstereodatabase/.