 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Vision Architecture for Autonomous Clothes Manipulation
Paper and Code
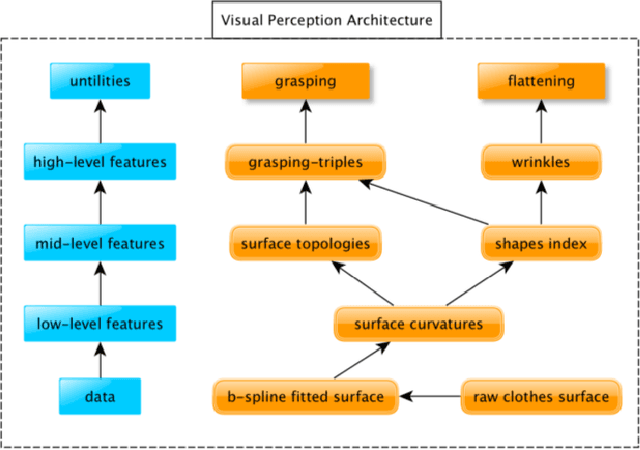

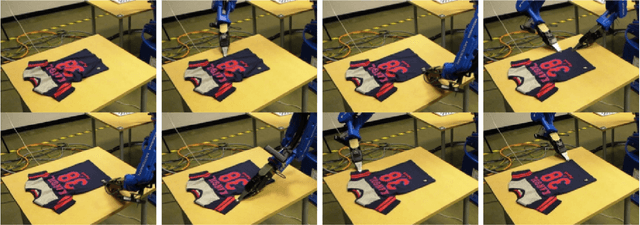

This paper presents a novel robot vision architecture for perceiving generic 3D clothes configurations. Our architecture is hierarchically structured, starting from low-level curvatures, across mid-level geometric shapes \& topology descriptions; and finally approaching high-level semantic surface structure descriptions. We demonstrate our robot vision architecture in a customised dual-arm industrial robot with our self-designed, off-the-self stereo vision system, carrying out autonomous grasping and dual-arm flattening. It is worth noting that the proposed dual-arm flattening approach is unique among the state-of-the-art robot autonomous system, which is the major contribution of this paper. The experimental results show that the proposed dual-arm flattening using stereo vision system remarkably outperforms the single-arm flattening and widely-cited Kinect-based sensing system for dexterous manipulation tasks. In addition, the proposed grasping approach achieves satisfactory performance on grasping various kind of garments, verifying the capability of proposed visual perception architecture to be adapted to more than one clothing manipulation tasks.