 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Driving like a Human driver instead of a Robocar: Personalized comfortable driving experience for autonomous vehicles
Jan 12, 2020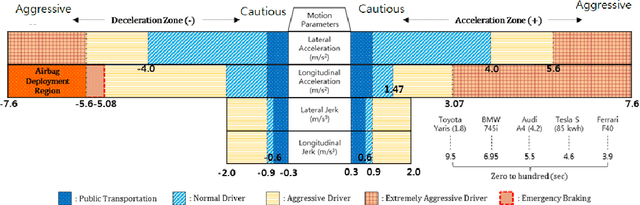
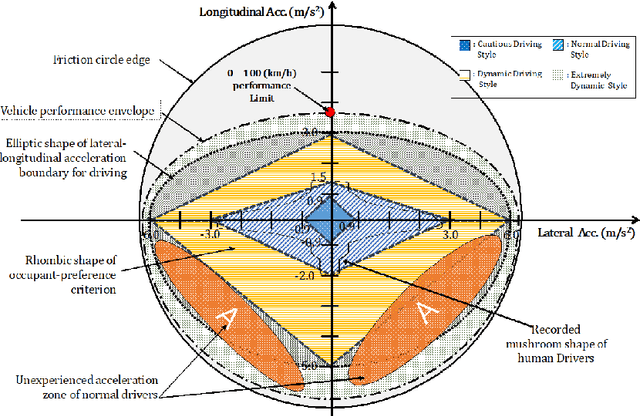
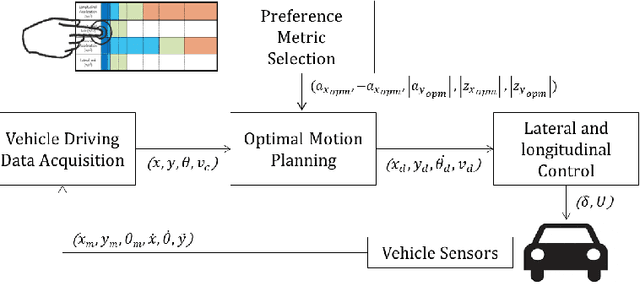
This paper issues an integrated control system of self-driving autonomous vehicles based on the personal driving preference to provide personalized comfortable driving experience to autonomous vehicle users. We propose an Occupant's Preference Metric (OPM) which is defining a preferred lateral and longitudinal acceleration region with maximum allowable jerk for users. Moreover, we propose a vehicle controller based on control parameters enabling integrated lateral and longitudinal control via preference-aware maneuvering of autonomous vehicles. The proposed system not only provides the criteria for the occupant's driving preference, but also provides a personalized autonomous self-driving style like a human driver instead of a Robocar. The simulation and experimental results demonstrated that the proposed system can maneuver the self-driving vehicle like a human driver by tracking the specified criterion of admissible acceleration and jerk.
A Deep Neural Network for Pixel-Level Electromagnetic Particle Identification in the MicroBooNE Liquid Argon Time Projection Chamber
Aug 22, 2018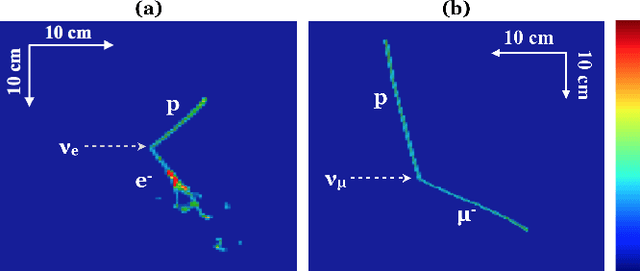
We have developed a convolutional neural network (CNN) that can make a pixel-level prediction of objects in image data recorded by a liquid argon time projection chamber (LArTPC) for the first time. We describe the network design, training techniques, and software tools developed to train this network. The goal of this work is to develop a complete deep neural network based data reconstruction chain for the MicroBooNE detector. We show the first demonstration of a network's validity on real LArTPC data using MicroBooNE collection plane images. The demonstration is performed for stopping muon and a $\nu_\mu$ charged current neutral pion data samples.