 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Driving like a Human driver instead of a Robocar: Personalized comfortable driving experience for autonomous vehicles
Jan 12, 2020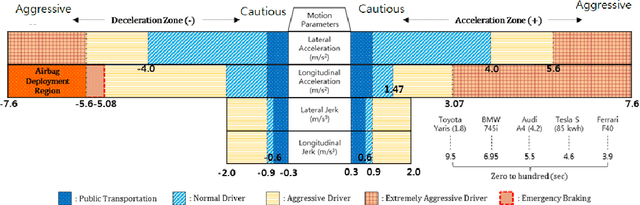
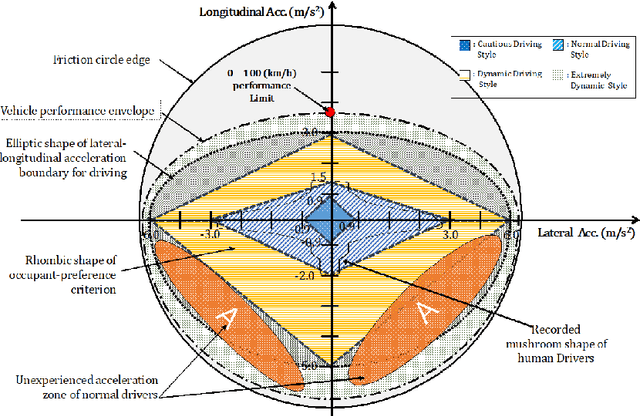
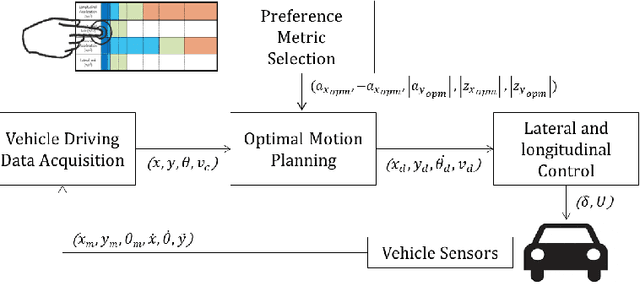
This paper issues an integrated control system of self-driving autonomous vehicles based on the personal driving preference to provide personalized comfortable driving experience to autonomous vehicle users. We propose an Occupant's Preference Metric (OPM) which is defining a preferred lateral and longitudinal acceleration region with maximum allowable jerk for users. Moreover, we propose a vehicle controller based on control parameters enabling integrated lateral and longitudinal control via preference-aware maneuvering of autonomous vehicles. The proposed system not only provides the criteria for the occupant's driving preference, but also provides a personalized autonomous self-driving style like a human driver instead of a Robocar. The simulation and experimental results demonstrated that the proposed system can maneuver the self-driving vehicle like a human driver by tracking the specified criterion of admissible acceleration and jerk.
Dynamic Locomotion For Passive-Ankle Biped Robots And Humanoids Using Whole-Body Locomotion Control
Jan 23, 2019



Whole-body control (WBC) is a generic task-oriented control method for feedback control of loco-manipulation behaviors in humanoid robots. The combination of WBC and model-based walking controllers has been widely utilized in various humanoid robots. However, to date, the WBC method has not been employed for unsupported passive-ankle dynamic locomotion. As such, in this paper, we devise a new WBC, dubbed whole-body locomotion controller (WBLC), that can achieve experimental dynamic walking on unsupported passive-ankle biped robots. A key aspect of WBLC is the relaxation of contact constraints such that the control commands produce reduced jerk when switching foot contacts. To achieve robust dynamic locomotion, we conduct an in-depth analysis of uncertainty for our dynamic walking algorithm called time-to-velocity-reversal (TVR) planner. The uncertainty study is fundamental as it allows us to improve the control algorithms and mechanical structure of our robot to fulfill the tolerated uncertainty. In addition, we conduct extensive experimentation for: 1) unsupported dynamic balancing (i.e. in-place stepping) with a six degree-of-freedom (DoF) biped, Mercury; 2) unsupported directional walking with Mercury; 3) walking over an irregular and slippery terrain with Mercury; and 4) in-place walking with our newly designed ten-DoF viscoelastic liquid-cooled biped, DRACO. Overall, the main contributions of this work are on: a) achieving various modalities of unsupported dynamic locomotion of passive-ankle bipeds using a WBLC controller and a TVR planner, b) conducting an uncertainty analysis to improve the mechanical structure and the controllers of Mercury, and c) devising a whole-body control strategy that reduces movement jerk during walking.