 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFOSSIL: Regret-minimizing weighting for robust learning under imbalance and small data
Sep 16, 2025Imbalanced and small data regimes are pervasive in domains such as rare disease imaging, genomics, and disaster response, where labeled samples are scarce and naive augmentation often introduces artifacts. Existing solutions such as oversampling, focal loss, or meta-weighting address isolated aspects of this challenge but remain fragile or complex. We introduce FOSSIL (Flexible Optimization via Sample Sensitive Importance Learning), a unified weighting framework that seamlessly integrates class imbalance correction, difficulty-aware curricula, augmentation penalties, and warmup dynamics into a single interpretable formula. Unlike prior heuristics, the proposed framework provides regret-based theoretical guarantees and achieves consistent empirical gains over ERM, curriculum, and meta-weighting baselines on synthetic and real-world datasets, while requiring no architectural changes.
Self-Driving like a Human driver instead of a Robocar: Personalized comfortable driving experience for autonomous vehicles
Jan 12, 2020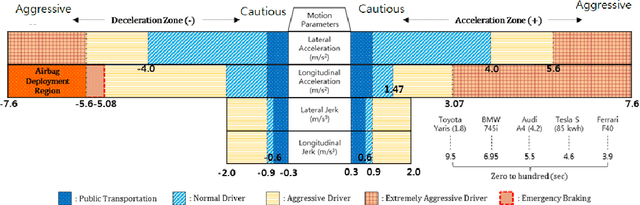
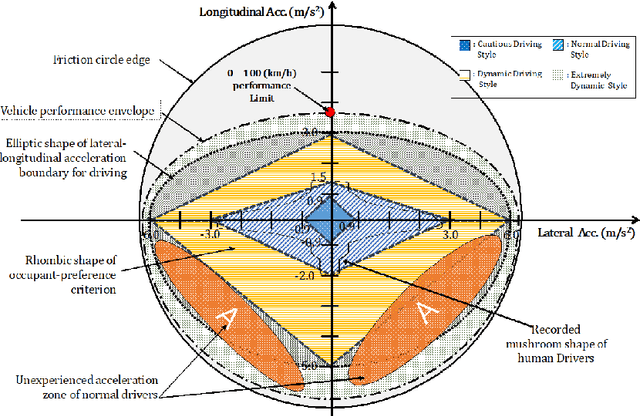
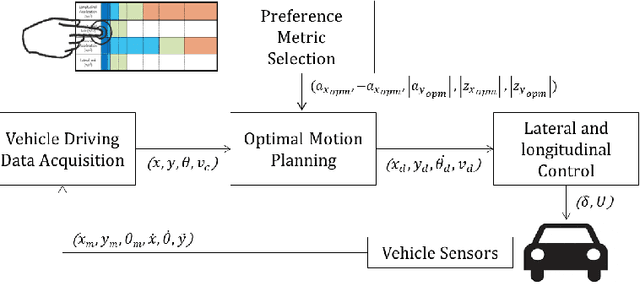
This paper issues an integrated control system of self-driving autonomous vehicles based on the personal driving preference to provide personalized comfortable driving experience to autonomous vehicle users. We propose an Occupant's Preference Metric (OPM) which is defining a preferred lateral and longitudinal acceleration region with maximum allowable jerk for users. Moreover, we propose a vehicle controller based on control parameters enabling integrated lateral and longitudinal control via preference-aware maneuvering of autonomous vehicles. The proposed system not only provides the criteria for the occupant's driving preference, but also provides a personalized autonomous self-driving style like a human driver instead of a Robocar. The simulation and experimental results demonstrated that the proposed system can maneuver the self-driving vehicle like a human driver by tracking the specified criterion of admissible acceleration and jerk.