 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainability of Deep Neural Networks for Brain Tumor Detection
Oct 10, 2024
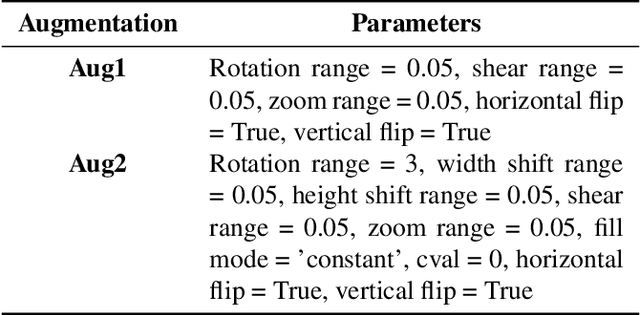


Medical image classification is crucial for supporting healthcare professionals in decision-making and training. While Convolutional Neural Networks (CNNs) have traditionally dominated this field, Transformer-based models are gaining attention. In this study, we apply explainable AI (XAI) techniques to assess the performance of various models on real-world medical data and identify areas for improvement. We compare CNN models such as VGG-16, ResNet-50, and EfficientNetV2L with a Transformer model: ViT-Base-16. Our results show that data augmentation has little impact, but hyperparameter tuning and advanced modeling improve performance. CNNs, particularly VGG-16 and ResNet-50, outperform ViT-Base-16 and EfficientNetV2L, likely due to underfitting from limited data. XAI methods like LIME and SHAP further reveal that better-performing models visualize tumors more effectively. These findings suggest that CNNs with shallower architectures are more effective for small datasets and can support medical decision-making.
A Convolutional Neural Network based Cascade Reconstruction for the IceCube Neutrino Observatory
Jan 27, 2021Continued improvements on existing reconstruction methods are vital to the success of high-energy physics experiments, such as the IceCube Neutrino Observatory. In IceCube, further challenges arise as the detector is situated at the geographic South Pole where computational resources are limited. However, to perform real-time analyses and to issue alerts to telescopes around the world, powerful and fast reconstruction methods are desired. Deep neural networks can be extremely powerful, and their usage is computationally inexpensive once the networks are trained. These characteristics make a deep learning-based approach an excellent candidate for the application in IceCube. A reconstruction method based on convolutional architectures and hexagonally shaped kernels is presented. The presented method is robust towards systematic uncertainties in the simulation and has been tested on experimental data. In comparison to standard reconstruction methods in IceCube, it can improve upon the reconstruction accuracy, while reducing the time necessary to run the reconstruction by two to three orders of magnitude.
Self-Driving like a Human driver instead of a Robocar: Personalized comfortable driving experience for autonomous vehicles
Jan 12, 2020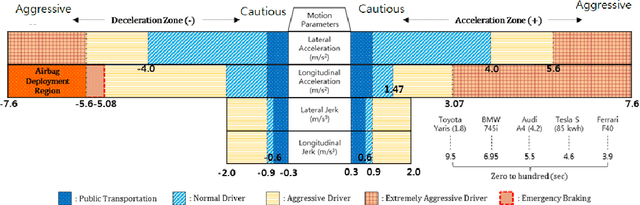
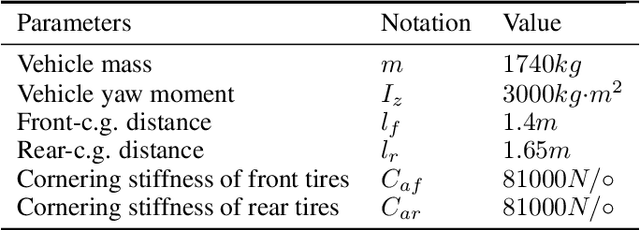
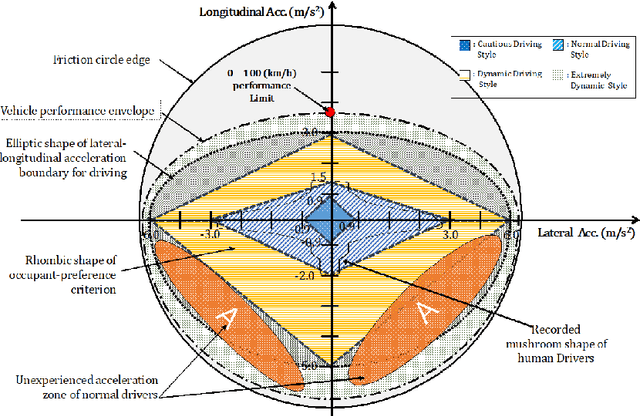
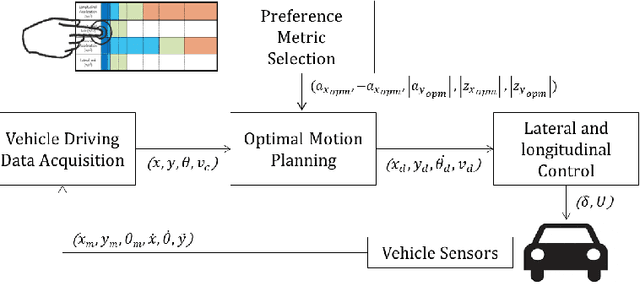
This paper issues an integrated control system of self-driving autonomous vehicles based on the personal driving preference to provide personalized comfortable driving experience to autonomous vehicle users. We propose an Occupant's Preference Metric (OPM) which is defining a preferred lateral and longitudinal acceleration region with maximum allowable jerk for users. Moreover, we propose a vehicle controller based on control parameters enabling integrated lateral and longitudinal control via preference-aware maneuvering of autonomous vehicles. The proposed system not only provides the criteria for the occupant's driving preference, but also provides a personalized autonomous self-driving style like a human driver instead of a Robocar. The simulation and experimental results demonstrated that the proposed system can maneuver the self-driving vehicle like a human driver by tracking the specified criterion of admissible acceleration and jerk.