 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Locomotion For Passive-Ankle Biped Robots And Humanoids Using Whole-Body Locomotion Control
Jan 23, 2019



Whole-body control (WBC) is a generic task-oriented control method for feedback control of loco-manipulation behaviors in humanoid robots. The combination of WBC and model-based walking controllers has been widely utilized in various humanoid robots. However, to date, the WBC method has not been employed for unsupported passive-ankle dynamic locomotion. As such, in this paper, we devise a new WBC, dubbed whole-body locomotion controller (WBLC), that can achieve experimental dynamic walking on unsupported passive-ankle biped robots. A key aspect of WBLC is the relaxation of contact constraints such that the control commands produce reduced jerk when switching foot contacts. To achieve robust dynamic locomotion, we conduct an in-depth analysis of uncertainty for our dynamic walking algorithm called time-to-velocity-reversal (TVR) planner. The uncertainty study is fundamental as it allows us to improve the control algorithms and mechanical structure of our robot to fulfill the tolerated uncertainty. In addition, we conduct extensive experimentation for: 1) unsupported dynamic balancing (i.e. in-place stepping) with a six degree-of-freedom (DoF) biped, Mercury; 2) unsupported directional walking with Mercury; 3) walking over an irregular and slippery terrain with Mercury; and 4) in-place walking with our newly designed ten-DoF viscoelastic liquid-cooled biped, DRACO. Overall, the main contributions of this work are on: a) achieving various modalities of unsupported dynamic locomotion of passive-ankle bipeds using a WBLC controller and a TVR planner, b) conducting an uncertainty analysis to improve the mechanical structure and the controllers of Mercury, and c) devising a whole-body control strategy that reduces movement jerk during walking.
ControlIt! - A Software Framework for Whole-Body Operational Space Control
Jun 02, 2015
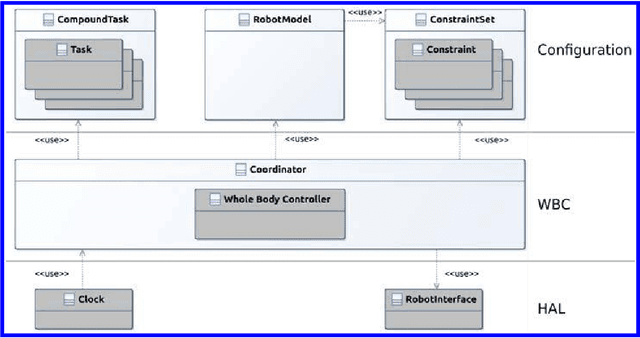


Whole Body Operational Space Control (WBOSC) is a pioneering algorithm in the field of human-centered Whole-Body Control (WBC). It enables floating-base highly-redundant robots to achieve unified motion/force control of one or more operational space objectives while adhering to physical constraints. Limited studies exist on the software architecture and APIs that enable WBOSC to perform and be integrated into a larger system. In this paper we address this by presenting ControlIt!, a new open-source software framework for WBOSC. Unlike previous implementations, ControlIt! is multi-threaded to increase servo frequencies on standard PC hardware. A new parameter binding mechanism enables tight integration between ControlIt! and external processes via an extensible set of transport protocols. To support a new robot, only two plugins and a URDF model needs to be provided --- the rest of ControlIt! remains unchanged. New WBC primitives can be added by writing a Task or Constraint plugin. ControlIt!'s capabilities are demonstrated on Dreamer, a 16-DOF torque controlled humanoid upper body robot containing both series elastic and co-actuated joints, and using it to perform a product disassembly task. Using this testbed, we show that ControlIt! can achieve average servo latencies of about 0.5ms when configured with two Cartesian position tasks, two orientation tasks, and a lower priority posture task. This is significantly higher than the 5ms that was achieved using UTA-WBC, the prototype implementation of WBOSC that is both application and platform-specific. Variations in the product's position is handled by updating the goal of the Cartesian position task. ControlIt!'s source code is released under an LGPL license and we hope it will be adopted and maintained by the WBC community for the long term as a platform for WBC development and integration.