 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Disjunctive Temporal Networks with Uncertainty under Restricted Time-Based Controllability using Tree Search and Graph Neural Networks
Mar 30, 2022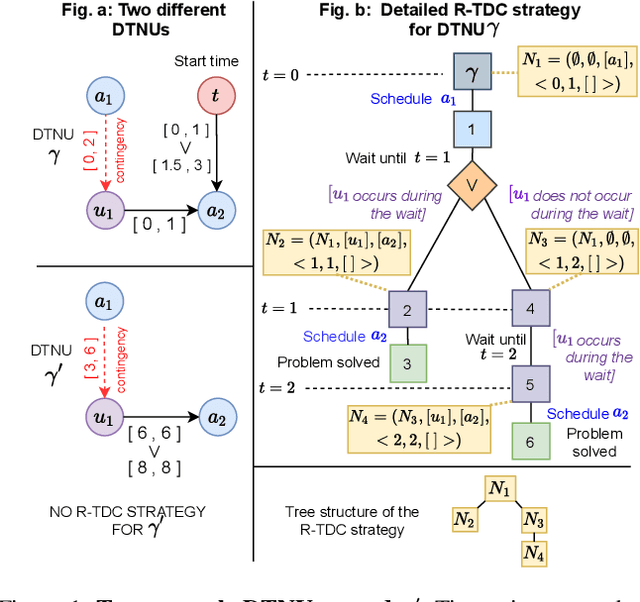
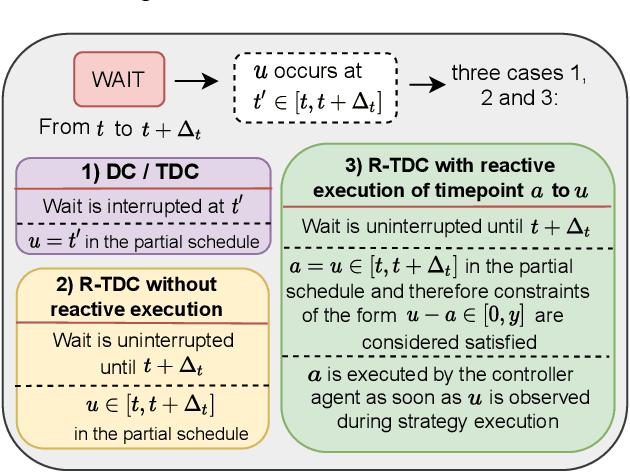
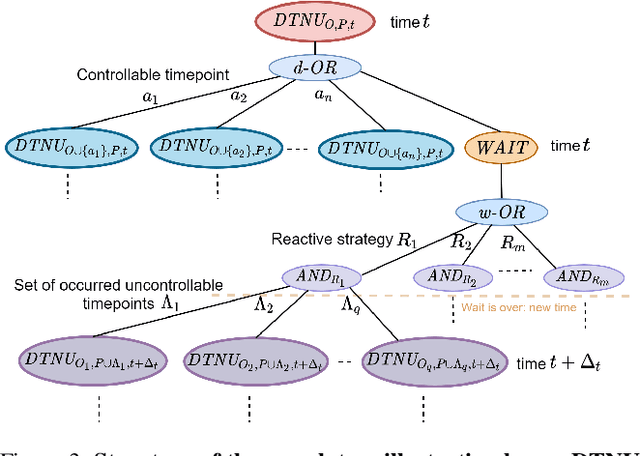
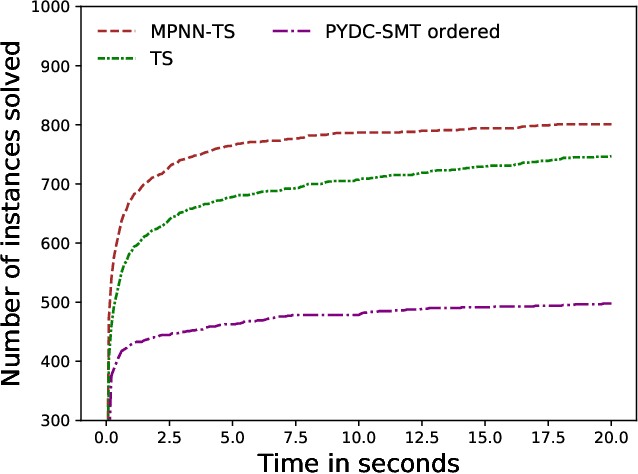
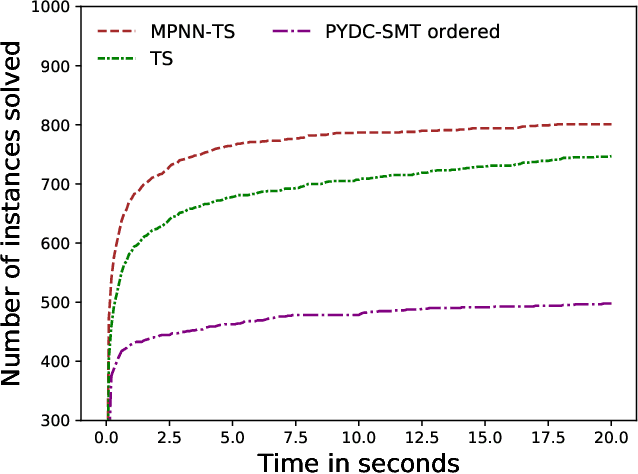
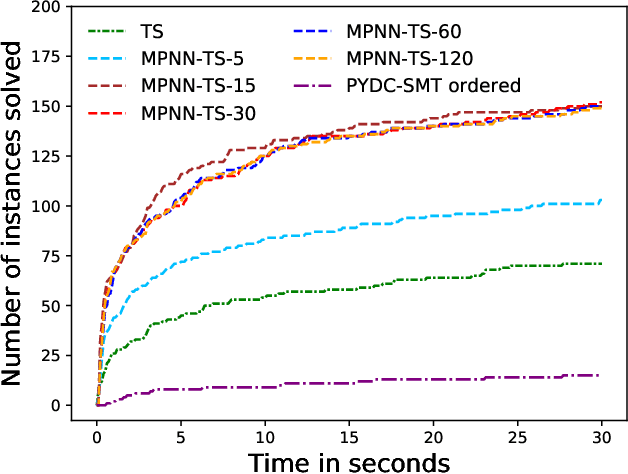
Planning under uncertainty is an area of interest in artificial intelligence. We present a novel approach based on tree search and graph machine learning for the scheduling problem known as Disjunctive Temporal Networks with Uncertainty (DTNU). Dynamic Controllability (DC) of DTNUs seeks a reactive scheduling strategy to satisfy temporal constraints in response to uncontrollable action durations. We introduce new semantics for reactive scheduling: Time-based Dynamic Controllability (TDC) and a restricted subset of TDC, R-TDC. We design a tree search algorithm to determine whether or not a DTNU is R-TDC. Moreover, we leverage a graph neural network as a heuristic for tree search guidance. Finally, we conduct experiments on a known benchmark on which we show R-TDC to retain significant completeness with regard to DC, while being faster to prove. This results in the tree search processing fifty percent more DTNU problems in R-TDC than the state-of-the-art DC solver does in DC with the same time budget. We also observe that graph neural network search guidance leads to substantial performance gains on benchmarks of more complex DTNUs, with up to eleven times more problems solved than the baseline tree search.
* Thirty-Sixth AAAI Conference on Artificial Intelligence. This version includes the technical appendix. arXiv admin note: substantial text overlap with arXiv:2108.01068
Time-based Dynamic Controllability of Disjunctive Temporal Networks with Uncertainty: A Tree Search Approach with Graph Neural Network Guidance
Aug 02, 2021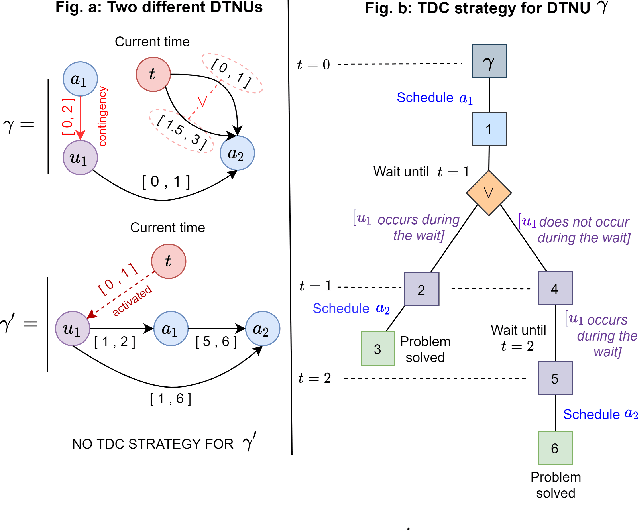
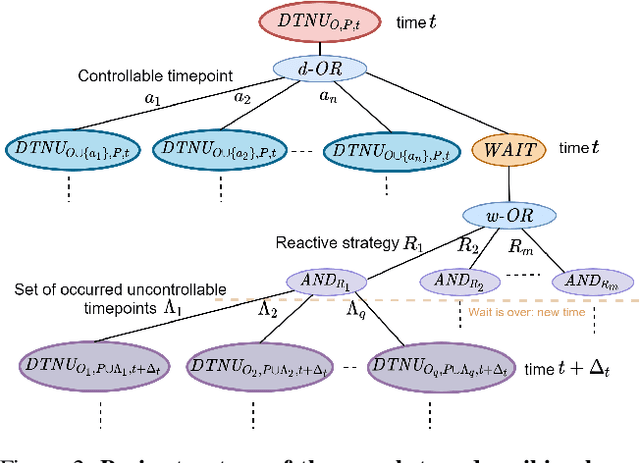
Scheduling in the presence of uncertainty is an area of interest in artificial intelligence due to the large number of applications. We study the problem of dynamic controllability (DC) of disjunctive temporal networks with uncertainty (DTNU), which seeks a strategy to satisfy all constraints in response to uncontrollable action durations. We introduce a more restricted, stronger form of controllability than DC for DTNUs, time-based dynamic controllability (TDC), and present a tree search approach to determine whether or not a DTNU is TDC. Moreover, we leverage the learning capability of a message passing neural network (MPNN) as a heuristic for tree search guidance. Finally, we conduct experiments for which the tree search shows superior results to state-of-the-art timed-game automata (TGA) based approaches. We observe that using an MPNN for tree search guidance leads to a significant increase in solving performance and scalability to harder DTNU problems.
Surrogate Search As a Way to Combat Harmful Effects of Ill-behaved Evaluation Functions
Nov 01, 2014
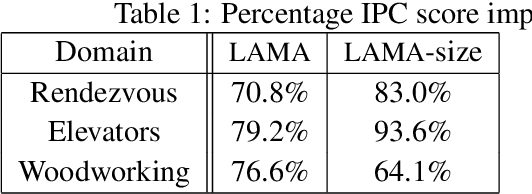
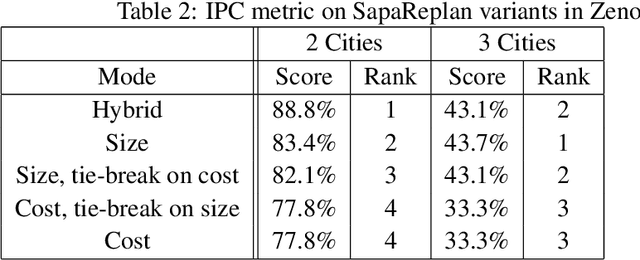
Recently, several researchers have found that cost-based satisficing search with A* often runs into problems. Although some "work arounds" have been proposed to ameliorate the problem, there has been little concerted effort to pinpoint its origin. In this paper, we argue that the origins of this problem can be traced back to the fact that most planners that try to optimize cost also use cost-based evaluation functions (i.e., f(n) is a cost estimate). We show that cost-based evaluation functions become ill-behaved whenever there is a wide variance in action costs; something that is all too common in planning domains. The general solution to this malady is what we call a surrogatesearch, where a surrogate evaluation function that doesn't directly track the cost objective, and is resistant to cost-variance, is used. We will discuss some compelling choices for surrogate evaluation functions that are based on size rather that cost. Of particular practical interest is a cost-sensitive version of size-based evaluation function -- where the heuristic estimates the size of cheap paths, as it provides attractive quality vs. speed tradeoffs
Cost Based Satisficing Search Considered Harmful
Mar 18, 2011


Recently, several researchers have found that cost-based satisficing search with A* often runs into problems. Although some "work arounds" have been proposed to ameliorate the problem, there has not been any concerted effort to pinpoint its origin. In this paper, we argue that the origins can be traced back to the wide variance in action costs that is observed in most planning domains. We show that such cost variance misleads A* search, and that this is no trifling detail or accidental phenomenon, but a systemic weakness of the very concept of "cost-based evaluation functions + systematic search + combinatorial graphs". We show that satisficing search with sized-based evaluation functions is largely immune to this problem.