 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning and Learning: A Review of Methods involving Path-Planning for Autonomous Vehicles
Jul 26, 2022
This short review aims to make the reader familiar with state-of-the-art works relating to planning, scheduling and learning. First, we study state-of-the-art planning algorithms. We give a brief introduction of neural networks. Then we explore in more detail graph neural networks, a recent variant of neural networks suited for processing graph-structured inputs. We describe briefly the concept of reinforcement learning algorithms and some approaches designed to date. Next, we study some successful approaches combining neural networks for path-planning. Lastly, we focus on temporal planning problems with uncertainty.
Solving Disjunctive Temporal Networks with Uncertainty under Restricted Time-Based Controllability using Tree Search and Graph Neural Networks
Mar 30, 2022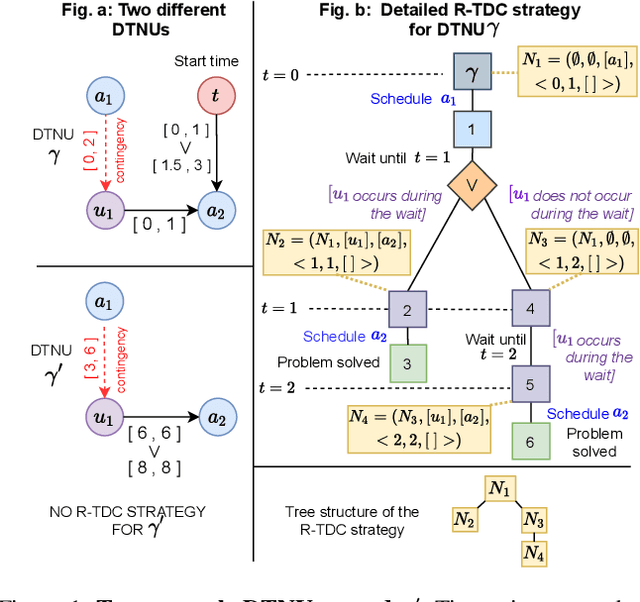
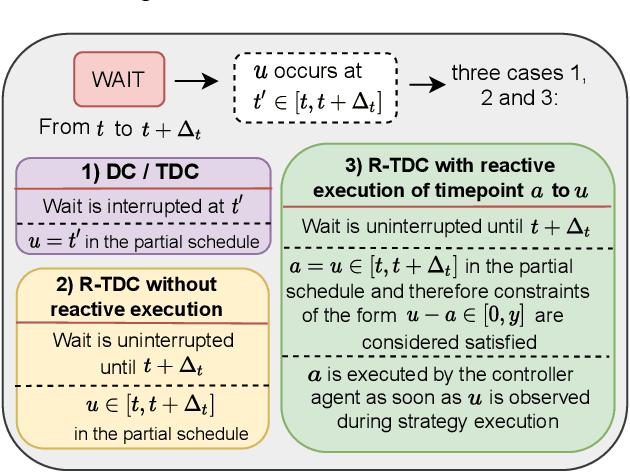
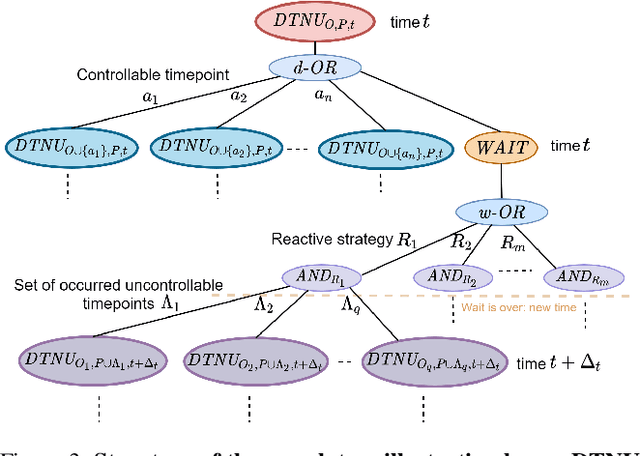
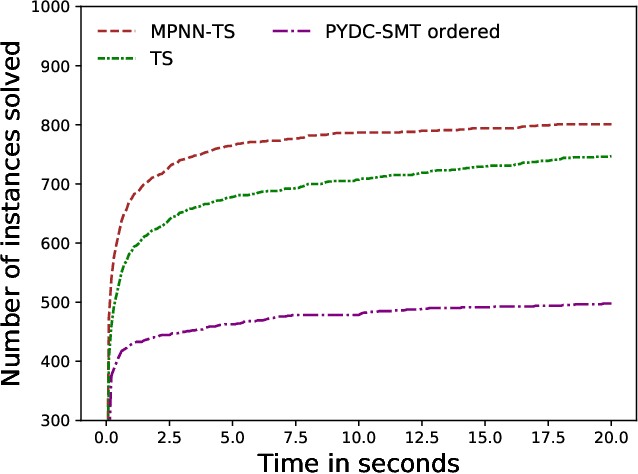
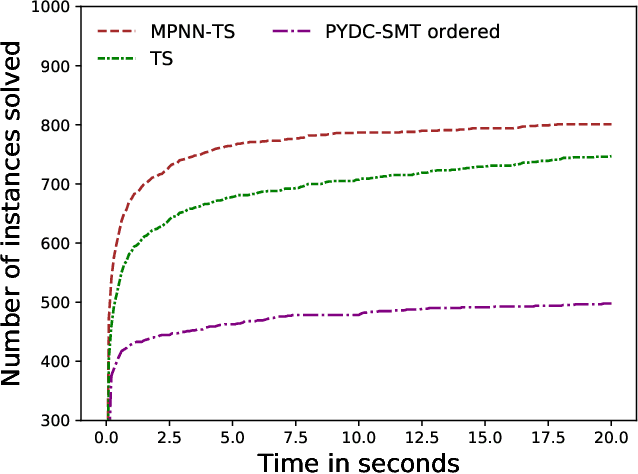
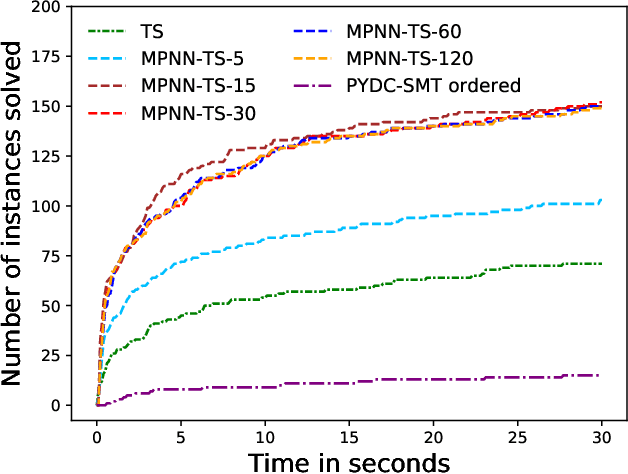
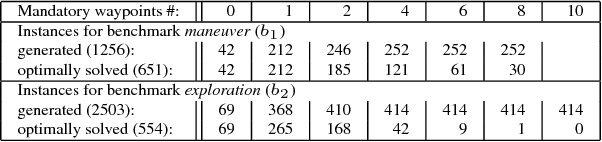
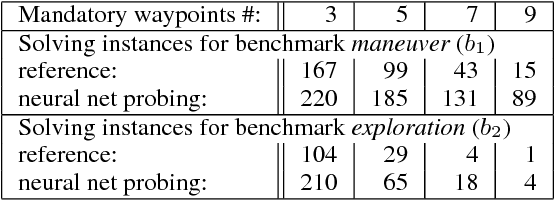
Planning under uncertainty is an area of interest in artificial intelligence. We present a novel approach based on tree search and graph machine learning for the scheduling problem known as Disjunctive Temporal Networks with Uncertainty (DTNU). Dynamic Controllability (DC) of DTNUs seeks a reactive scheduling strategy to satisfy temporal constraints in response to uncontrollable action durations. We introduce new semantics for reactive scheduling: Time-based Dynamic Controllability (TDC) and a restricted subset of TDC, R-TDC. We design a tree search algorithm to determine whether or not a DTNU is R-TDC. Moreover, we leverage a graph neural network as a heuristic for tree search guidance. Finally, we conduct experiments on a known benchmark on which we show R-TDC to retain significant completeness with regard to DC, while being faster to prove. This results in the tree search processing fifty percent more DTNU problems in R-TDC than the state-of-the-art DC solver does in DC with the same time budget. We also observe that graph neural network search guidance leads to substantial performance gains on benchmarks of more complex DTNUs, with up to eleven times more problems solved than the baseline tree search.
* Thirty-Sixth AAAI Conference on Artificial Intelligence. This version includes the technical appendix. arXiv admin note: substantial text overlap with arXiv:2108.01068
Time-based Dynamic Controllability of Disjunctive Temporal Networks with Uncertainty: A Tree Search Approach with Graph Neural Network Guidance
Aug 02, 2021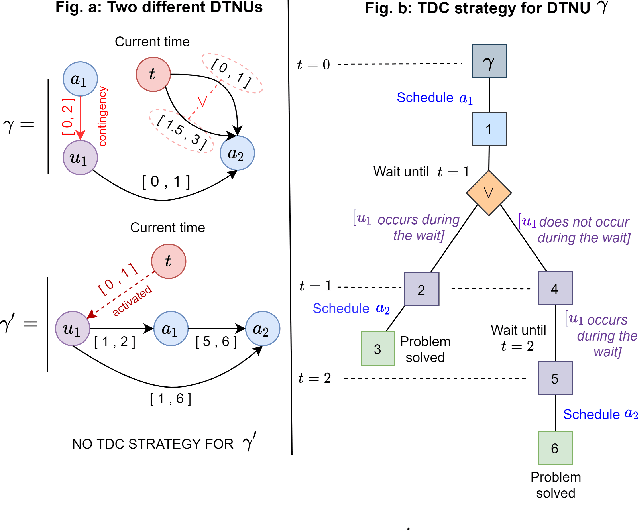
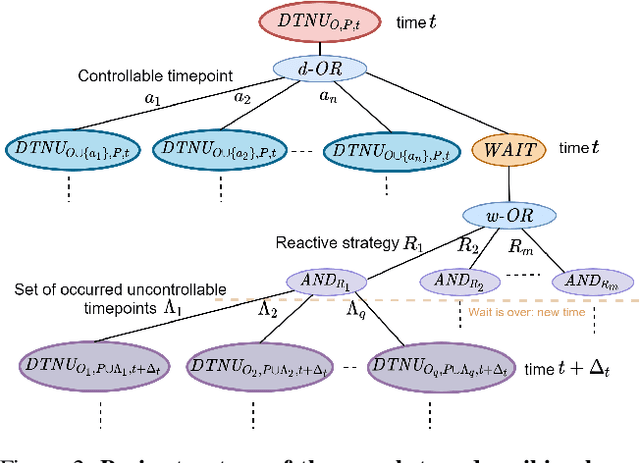
Scheduling in the presence of uncertainty is an area of interest in artificial intelligence due to the large number of applications. We study the problem of dynamic controllability (DC) of disjunctive temporal networks with uncertainty (DTNU), which seeks a strategy to satisfy all constraints in response to uncontrollable action durations. We introduce a more restricted, stronger form of controllability than DC for DTNUs, time-based dynamic controllability (TDC), and present a tree search approach to determine whether or not a DTNU is TDC. Moreover, we leverage the learning capability of a message passing neural network (MPNN) as a heuristic for tree search guidance. Finally, we conduct experiments for which the tree search shows superior results to state-of-the-art timed-game automata (TGA) based approaches. We observe that using an MPNN for tree search guidance leads to a significant increase in solving performance and scalability to harder DTNU problems.
Learning-based Preference Prediction for Constrained Multi-Criteria Path-Planning
Aug 02, 2021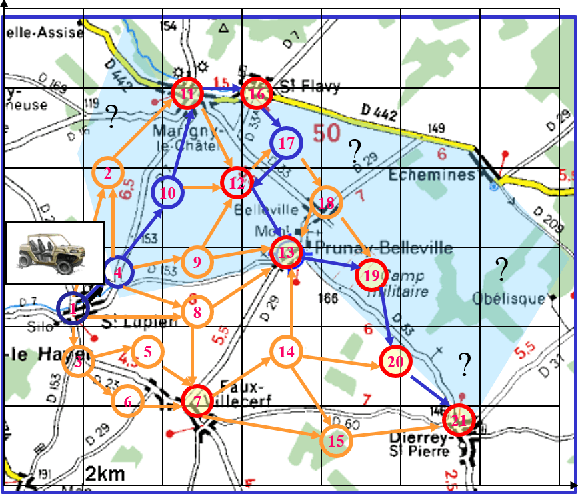
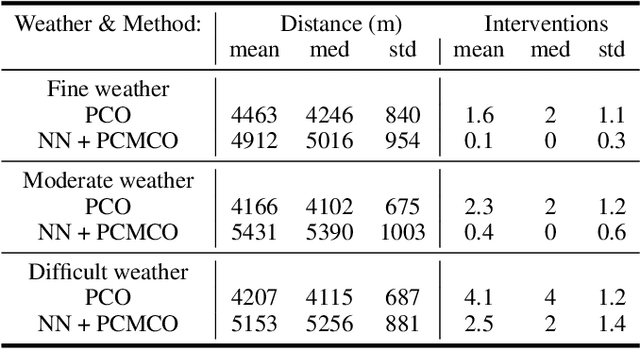

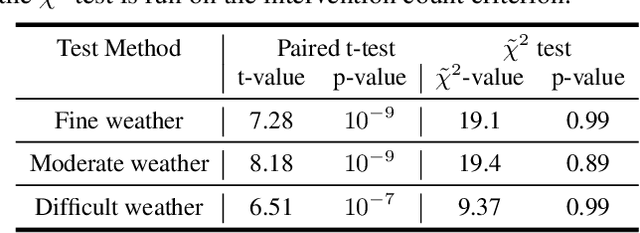
Learning-based methods are increasingly popular for search algorithms in single-criterion optimization problems. In contrast, for multiple-criteria optimization there are significantly fewer approaches despite the existence of numerous applications. Constrained path-planning for Autonomous Ground Vehicles (AGV) is one such application, where an AGV is typically deployed in disaster relief or search and rescue applications in off-road environments. The agent can be faced with the following dilemma : optimize a source-destination path according to a known criterion and an uncertain criterion under operational constraints. The known criterion is associated to the cost of the path, representing the distance. The uncertain criterion represents the feasibility of driving through the path without requiring human intervention. It depends on various external parameters such as the physics of the vehicle, the state of the explored terrains or weather conditions. In this work, we leverage knowledge acquired through offline simulations by training a neural network model to predict the uncertain criterion. We integrate this model inside a path-planner which can solve problems online. Finally, we conduct experiments on realistic AGV scenarios which illustrate that the proposed framework requires human intervention less frequently, trading for a limited increase in the path distance.
* arXiv admin note: text overlap with arXiv:2108.00978
Optimal Solving of Constrained Path-Planning Problems with Graph Convolutional Networks and Optimized Tree Search
Aug 02, 2021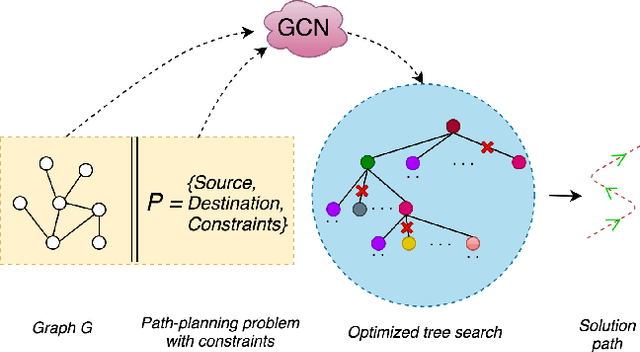
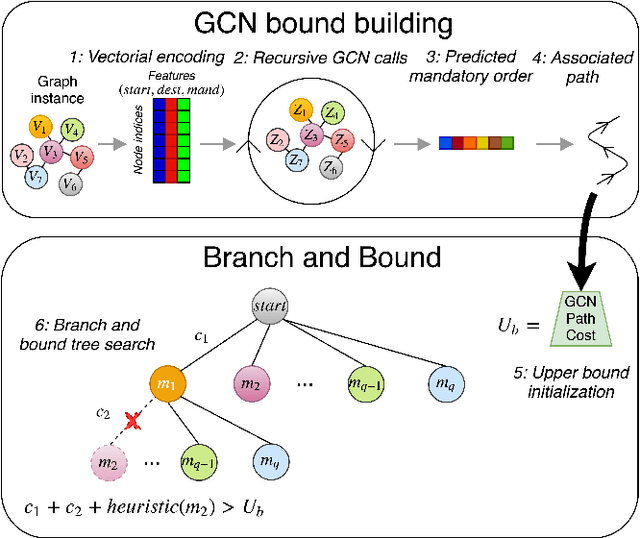
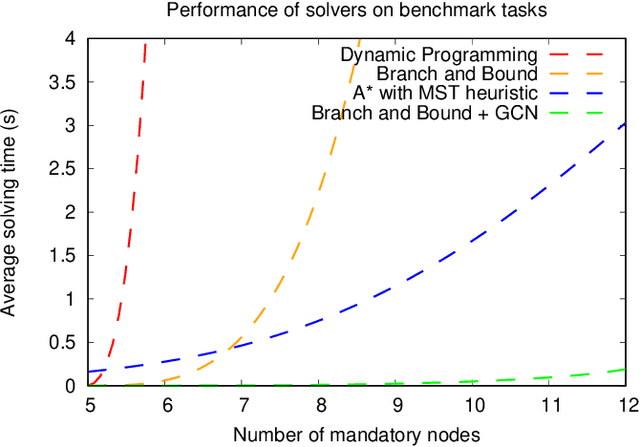
Learning-based methods are growing prominence for planning purposes. However, there are very few approaches for learning-assisted constrained path-planning on graphs, while there are multiple downstream practical applications. This is the case for constrained path-planning for Autonomous Unmanned Ground Vehicles (AUGV), typically deployed in disaster relief or search and rescue applications. In off-road environments, the AUGV must dynamically optimize a source-destination path under various operational constraints, out of which several are difficult to predict in advance and need to be addressed on-line. We propose a hybrid solving planner that combines machine learning models and an optimal solver. More specifically, a graph convolutional network (GCN) is used to assist a branch and bound (B&B) algorithm in handling the constraints. We conduct experiments on realistic scenarios and show that GCN support enables substantial speedup and smoother scaling to harder problems.
Learning off-road maneuver plans for autonomous vehicles
Aug 02, 2021


This thesis explores the benefits machine learning algorithms can bring to online planning and scheduling for autonomous vehicles in off-road situations. Mainly, we focus on typical problems of interest which include computing itineraries that meet certain objectives, as well as computing scheduling strategies to execute synchronized maneuvers with other vehicles. We present a range of learning-based heuristics to assist different itinerary planners. We show that these heuristics allow a significant increase in performance for optimal planners. Furthermore, in the case of approximate planning, we show that not only does the running time decrease, the quality of the itinerary found also becomes almost always better. Finally, in order to synthesize strategies to execute synchronized maneuvers, we propose a novel type of scheduling controllability and a learning-assisted algorithm. The proposed framework achieves significant improvement on known benchmarks in this controllability type over the performance of state-of-the-art works in a related controllability type. Moreover, it is able to find strategies on complex scheduling problems for which previous works fail to do so.
Constrained Shortest Path Search with Graph Convolutional Neural Networks
Aug 02, 2021
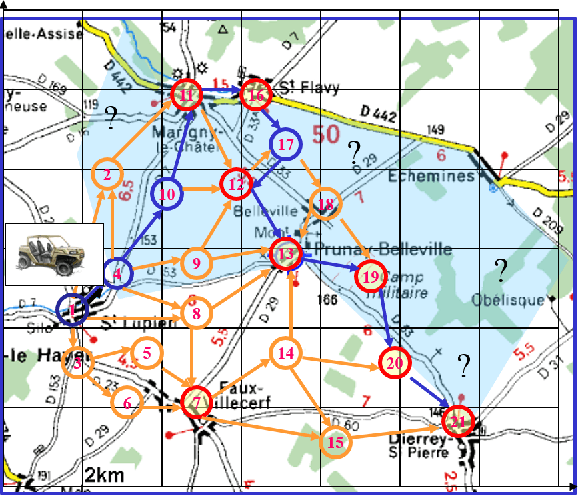
Planning for Autonomous Unmanned Ground Vehicles (AUGV) is still a challenge, especially in difficult, off-road, critical situations. Automatic planning can be used to reach mission objectives, to perform navigation or maneuvers. Most of the time, the problem consists in finding a path from a source to a destination, while satisfying some operational constraints. In a graph without negative cycles, the computation of the single-pair shortest path from a start node to an end node is solved in polynomial time. Additional constraints on the solution path can however make the problem harder to solve. This becomes the case when we need the path to pass through a few mandatory nodes without requiring a specific order of visit. The complexity grows exponentially with the number of mandatory nodes to visit. In this paper, we focus on shortest path search with mandatory nodes on a given connected graph. We propose a hybrid model that combines a constraint-based solver and a graph convolutional neural network to improve search performance. Promising results are obtained on realistic scenarios.