 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning off-road maneuver plans for autonomous vehicles
Paper and Code

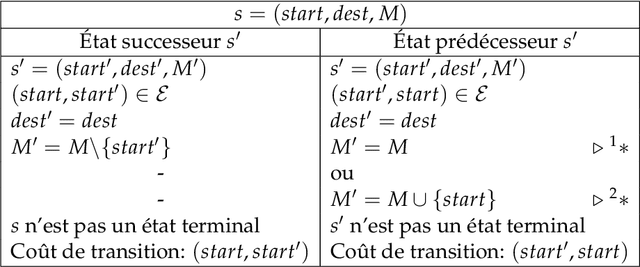


This thesis explores the benefits machine learning algorithms can bring to online planning and scheduling for autonomous vehicles in off-road situations. Mainly, we focus on typical problems of interest which include computing itineraries that meet certain objectives, as well as computing scheduling strategies to execute synchronized maneuvers with other vehicles. We present a range of learning-based heuristics to assist different itinerary planners. We show that these heuristics allow a significant increase in performance for optimal planners. Furthermore, in the case of approximate planning, we show that not only does the running time decrease, the quality of the itinerary found also becomes almost always better. Finally, in order to synthesize strategies to execute synchronized maneuvers, we propose a novel type of scheduling controllability and a learning-assisted algorithm. The proposed framework achieves significant improvement on known benchmarks in this controllability type over the performance of state-of-the-art works in a related controllability type. Moreover, it is able to find strategies on complex scheduling problems for which previous works fail to do so.