 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScikit-dimension: a Python package for intrinsic dimension estimation
Sep 06, 2021



Dealing with uncertainty in applications of machine learning to real-life data critically depends on the knowledge of intrinsic dimensionality (ID). A number of methods have been suggested for the purpose of estimating ID, but no standard package to easily apply them one by one or all at once has been implemented in Python. This technical note introduces \texttt{scikit-dimension}, an open-source Python package for intrinsic dimension estimation. \texttt{scikit-dimension} package provides a uniform implementation of most of the known ID estimators based on scikit-learn application programming interface to evaluate global and local intrinsic dimension, as well as generators of synthetic toy and benchmark datasets widespread in the literature. The package is developed with tools assessing the code quality, coverage, unit testing and continuous integration. We briefly describe the package and demonstrate its use in a large-scale (more than 500 datasets) benchmarking of methods for ID estimation in real-life and synthetic data. The source code is available from https://github.com/j-bac/scikit-dimension , the documentation is available from https://scikit-dimension.readthedocs.io .
Optimal measurement of visual motion across spatial and temporal scales
May 03, 2014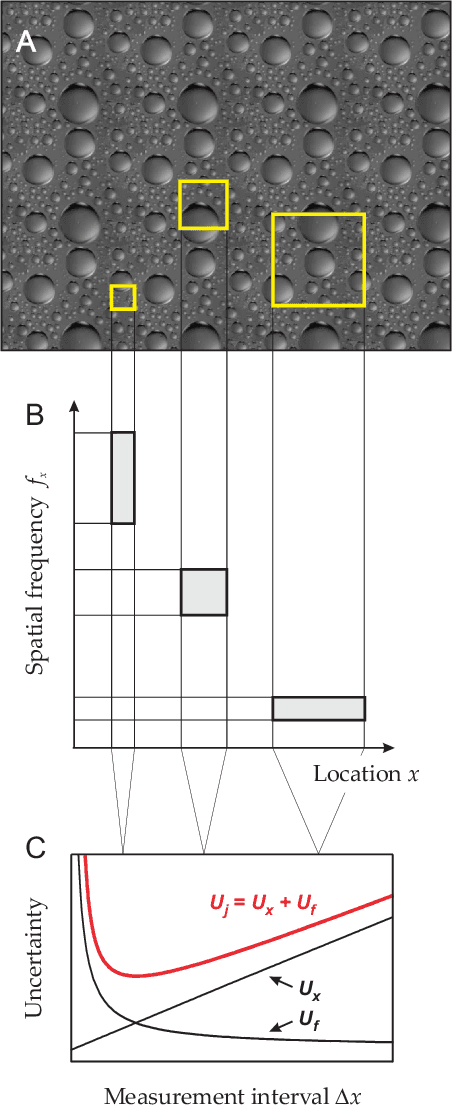
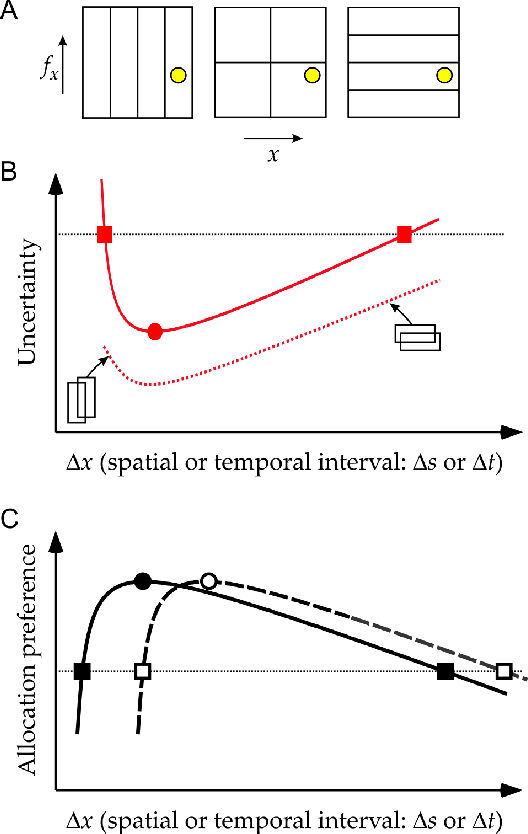
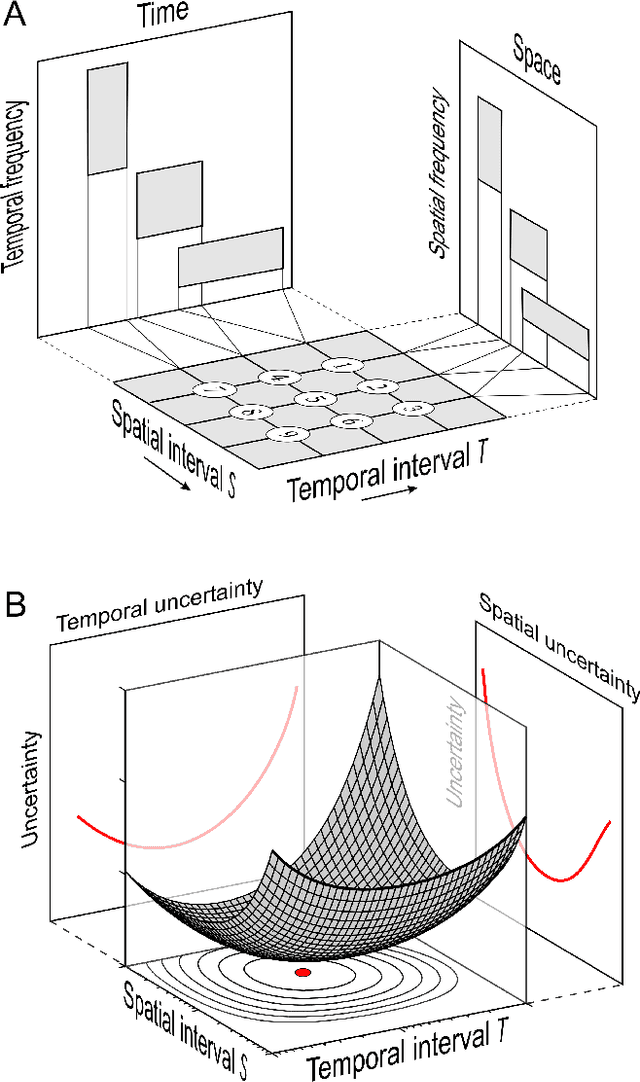
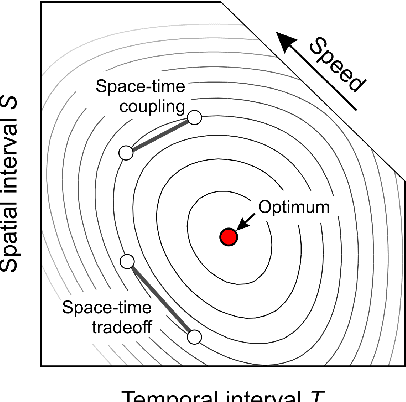
Sensory systems use limited resources to mediate the perception of a great variety of objects and events. Here a normative framework is presented for exploring how the problem of efficient allocation of resources can be solved in visual perception. Starting with a basic property of every measurement, captured by Gabor's uncertainty relation about the location and frequency content of signals, prescriptions are developed for optimal allocation of sensors for reliable perception of visual motion. This study reveals that a large-scale characteristic of human vision (the spatiotemporal contrast sensitivity function) is similar to the optimal prescription, and it suggests that some previously puzzling phenomena of visual sensitivity, adaptation, and perceptual organization have simple principled explanations.
Uncertainty of visual measurement and efficient allocation of sensory resources
May 03, 2014We review the reasoning underlying two approaches to combination of sensory uncertainties. First approach is noncommittal, making no assumptions about properties of uncertainty or parameters of stimulation. Then we explain the relationship between this approach and the one commonly used in modeling "higher level" aspects of sensory systems, such as in visual cue integration, where assumptions are made about properties of stimulation. The two approaches follow similar logic, except in one case maximal uncertainty is minimized, and in the other minimal certainty is maximized. Then we demonstrate how optimal solutions are found to the problem of resource allocation under uncertainty.
Feasibility of random basis function approximators for modeling and control
May 05, 2009


We discuss the role of random basis function approximators in modeling and control. We analyze the published work on random basis function approximators and demonstrate that their favorable error rate of convergence O(1/n) is guaranteed only with very substantial computational resources. We also discuss implications of our analysis for applications of neural networks in modeling and control.
Invariant template matching in systems with spatiotemporal coding: a vote for instability
Feb 14, 2007
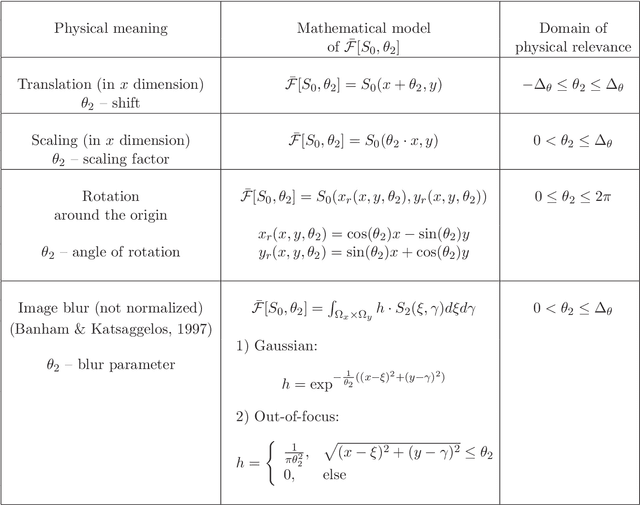
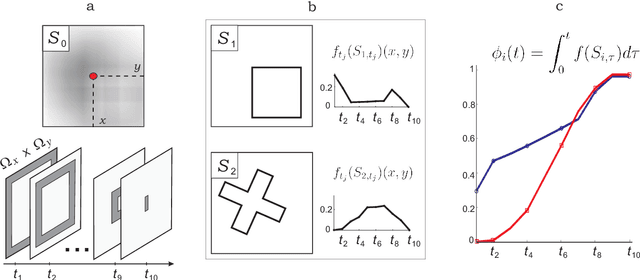
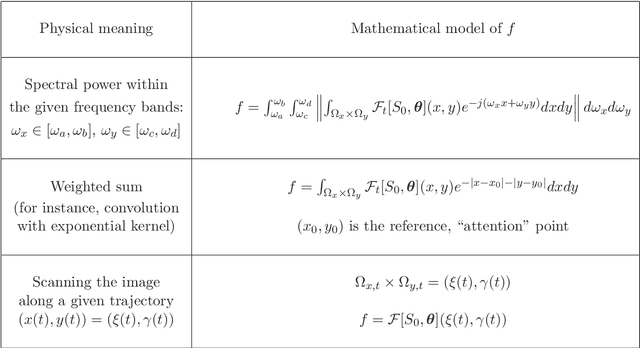
We consider the design of a pattern recognition that matches templates to images, both of which are spatially sampled and encoded as temporal sequences. The image is subject to a combination of various perturbations. These include ones that can be modeled as parameterized uncertainties such as image blur, luminance, translation, and rotation as well as unmodeled ones. Biological and neural systems require that these perturbations be processed through a minimal number of channels by simple adaptation mechanisms. We found that the most suitable mathematical framework to meet this requirement is that of weakly attracting sets. This framework provides us with a normative and unifying solution to the pattern recognition problem. We analyze the consequences of its explicit implementation in neural systems. Several properties inherent to the systems designed in accordance with our normative mathematical argument coincide with known empirical facts. This is illustrated in mental rotation, visual search and blur/intensity adaptation. We demonstrate how our results can be applied to a range of practical problems in template matching and pattern recognition.
* 52 pages, 12 figures