 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStableMTL: Repurposing Latent Diffusion Models for Multi-Task Learning from Partially Annotated Synthetic Datasets
Jun 09, 2025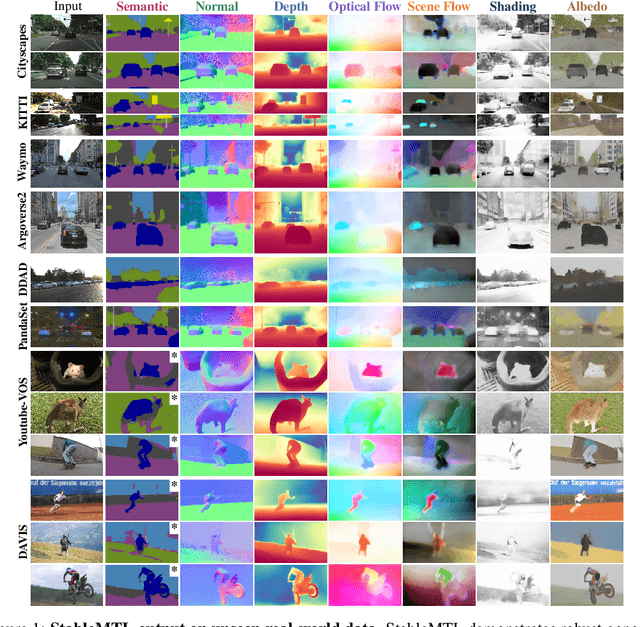

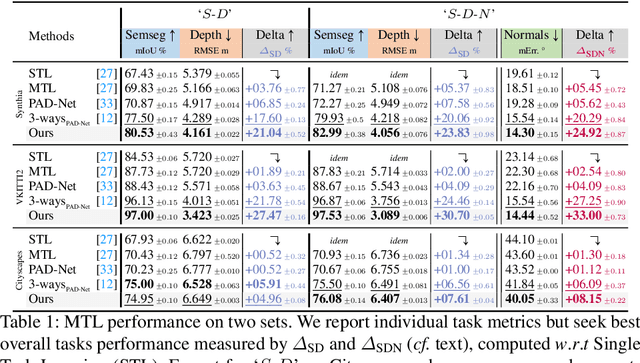
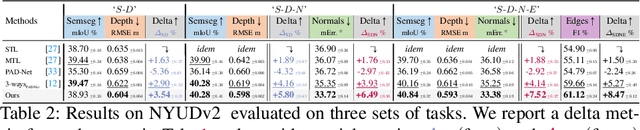
Multi-task learning for dense prediction is limited by the need for extensive annotation for every task, though recent works have explored training with partial task labels. Leveraging the generalization power of diffusion models, we extend the partial learning setup to a zero-shot setting, training a multi-task model on multiple synthetic datasets, each labeled for only a subset of tasks. Our method, StableMTL, repurposes image generators for latent regression. Adapting a denoising framework with task encoding, per-task conditioning and a tailored training scheme. Instead of per-task losses requiring careful balancing, a unified latent loss is adopted, enabling seamless scaling to more tasks. To encourage inter-task synergy, we introduce a multi-stream model with a task-attention mechanism that converts N-to-N task interactions into efficient 1-to-N attention, promoting effective cross-task sharing. StableMTL outperforms baselines on 7 tasks across 8 benchmarks.
MatSwap: Light-aware material transfers in images
Feb 11, 2025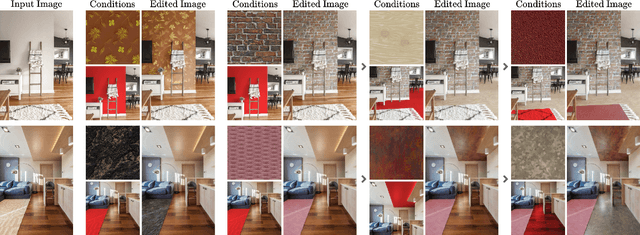
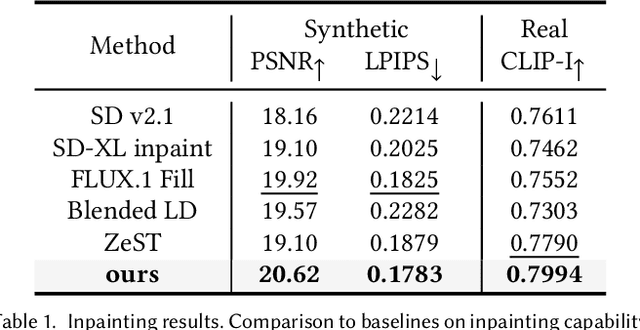
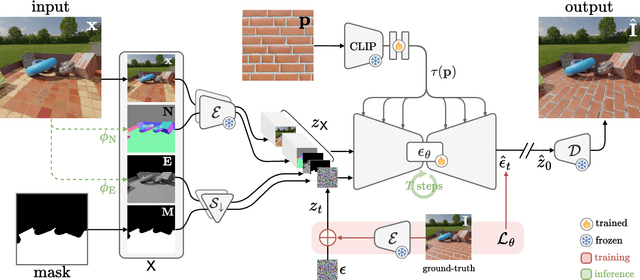
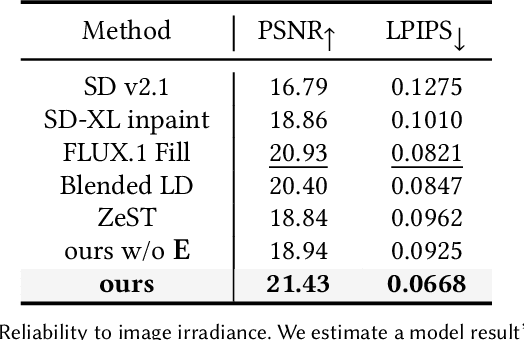
We present MatSwap, a method to transfer materials to designated surfaces in an image photorealistically. Such a task is non-trivial due to the large entanglement of material appearance, geometry, and lighting in a photograph. In the literature, material editing methods typically rely on either cumbersome text engineering or extensive manual annotations requiring artist knowledge and 3D scene properties that are impractical to obtain. In contrast, we propose to directly learn the relationship between the input material -- as observed on a flat surface -- and its appearance within the scene, without the need for explicit UV mapping. To achieve this, we rely on a custom light- and geometry-aware diffusion model. We fine-tune a large-scale pre-trained text-to-image model for material transfer using our synthetic dataset, preserving its strong priors to ensure effective generalization to real images. As a result, our method seamlessly integrates a desired material into the target location in the photograph while retaining the identity of the scene. We evaluate our method on synthetic and real images and show that it compares favorably to recent work both qualitatively and quantitatively. We will release our code and data upon publication.
Material Transforms from Disentangled NeRF Representations
Nov 12, 2024



In this paper, we first propose a novel method for transferring material transformations across different scenes. Building on disentangled Neural Radiance Field (NeRF) representations, our approach learns to map Bidirectional Reflectance Distribution Functions (BRDF) from pairs of scenes observed in varying conditions, such as dry and wet. The learned transformations can then be applied to unseen scenes with similar materials, therefore effectively rendering the transformation learned with an arbitrary level of intensity. Extensive experiments on synthetic scenes and real-world objects validate the effectiveness of our approach, showing that it can learn various transformations such as wetness, painting, coating, etc. Our results highlight not only the versatility of our method but also its potential for practical applications in computer graphics. We publish our method implementation, along with our synthetic/real datasets on https://github.com/astra-vision/BRDFTransform
Material Palette: Extraction of Materials from a Single Image
Nov 28, 2023In this paper, we propose a method to extract physically-based rendering (PBR) materials from a single real-world image. We do so in two steps: first, we map regions of the image to material concepts using a diffusion model, which allows the sampling of texture images resembling each material in the scene. Second, we benefit from a separate network to decompose the generated textures into Spatially Varying BRDFs (SVBRDFs), providing us with materials ready to be used in rendering applications. Our approach builds on existing synthetic material libraries with SVBRDF ground truth, but also exploits a diffusion-generated RGB texture dataset to allow generalization to new samples using unsupervised domain adaptation (UDA). Our contributions are thoroughly evaluated on synthetic and real-world datasets. We further demonstrate the applicability of our method for editing 3D scenes with materials estimated from real photographs. The code and models will be made open-source. Project page: https://astra-vision.github.io/MaterialPalette/
Cross-task Attention Mechanism for Dense Multi-task Learning
Jun 17, 2022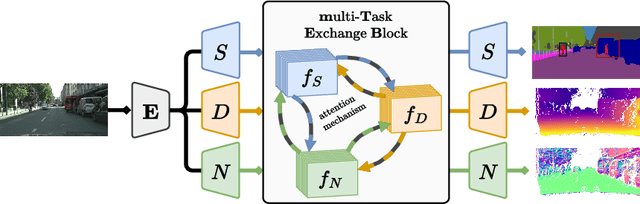

Multi-task learning has recently become a promising solution for a comprehensive understanding of complex scenes. Not only being memory-efficient, multi-task models with an appropriate design can favor exchange of complementary signals across tasks. In this work, we jointly address 2D semantic segmentation, and two geometry-related tasks, namely dense depth, surface normal estimation as well as edge estimation showing their benefit on indoor and outdoor datasets. We propose a novel multi-task learning architecture that exploits pair-wise cross-task exchange through correlation-guided attention and self-attention to enhance the average representation learning for all tasks. We conduct extensive experiments considering three multi-task setups, showing the benefit of our proposal in comparison to competitive baselines in both synthetic and real benchmarks. We also extend our method to the novel multi-task unsupervised domain adaptation setting. Our code is available at https://github.com/cv-rits/DenseMTL.