 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Resh Programming Language for Multirobot Orchestration
Mar 25, 2021
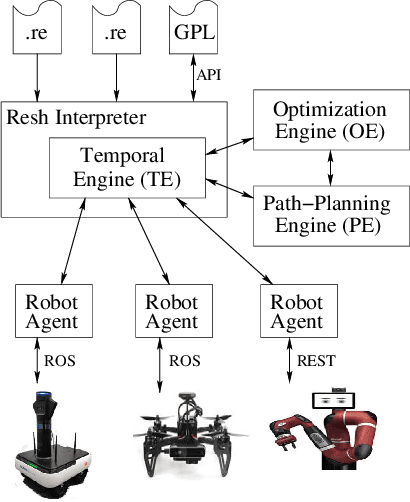
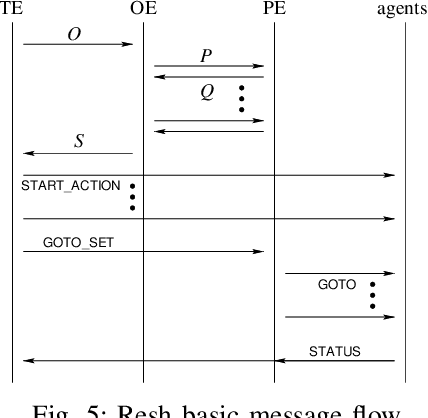
This paper describes Resh, a new, statically typed, interpreted programming language and associated runtime for orchestrating multirobot systems. The main features of Resh are: (1) It offloads much of the tedious work of programming such systems away from the programmer and into the language runtime; (2) It is based on a small set of temporal and locational operators; and (3) It is not restricted to specific robot types or tasks. The Resh runtime consists of three engines that collaborate to run a Resh program using the available robots in their current environment. This paper describes both Resh and its runtime and gives examples of its use.
Verifying Robustness of Gradient Boosted Models
Jun 26, 2019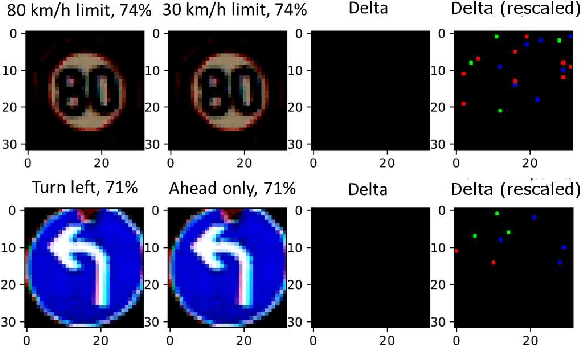
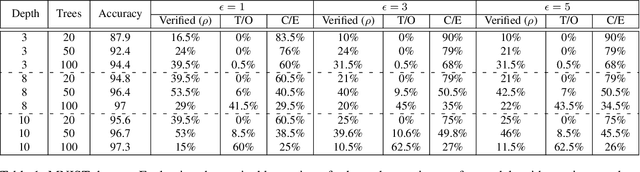
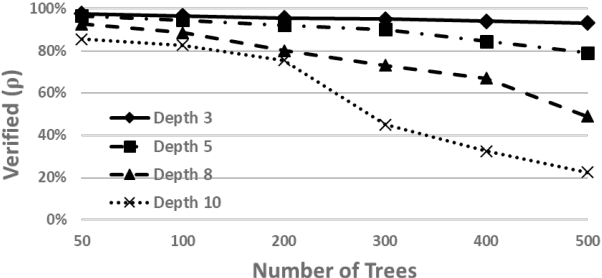
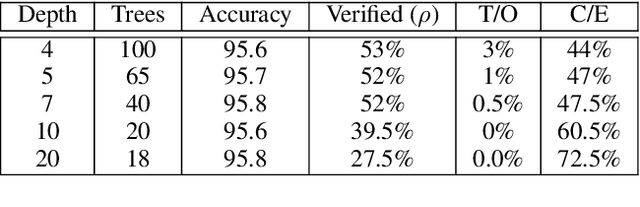
Gradient boosted models are a fundamental machine learning technique. Robustness to small perturbations of the input is an important quality measure for machine learning models, but the literature lacks a method to prove the robustness of gradient boosted models. This work introduces VeriGB, a tool for quantifying the robustness of gradient boosted models. VeriGB encodes the model and the robustness property as an SMT formula, which enables state of the art verification tools to prove the model's robustness. We extensively evaluate VeriGB on publicly available datasets and demonstrate a capability for verifying large models. Finally, we show that some model configurations tend to be inherently more robust than others.
Learning Software Constraints via Installation Attempts
Apr 24, 2018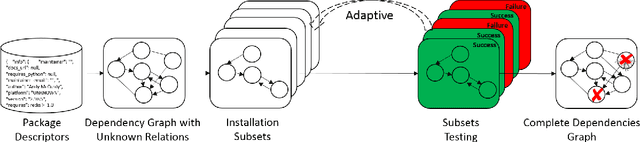
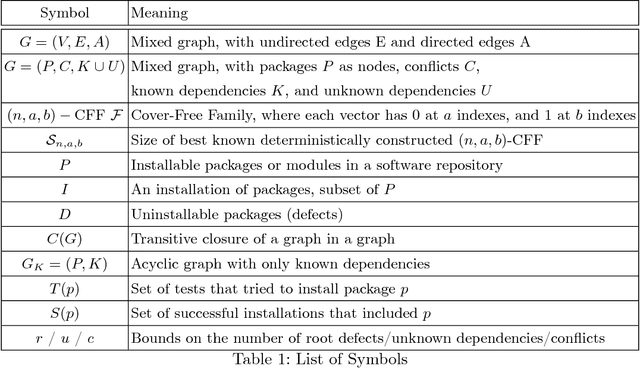
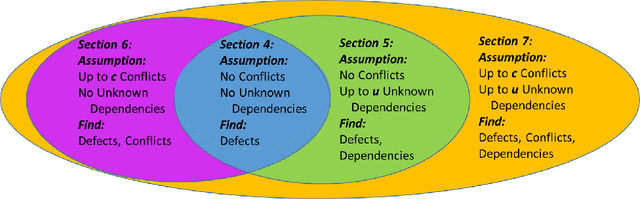
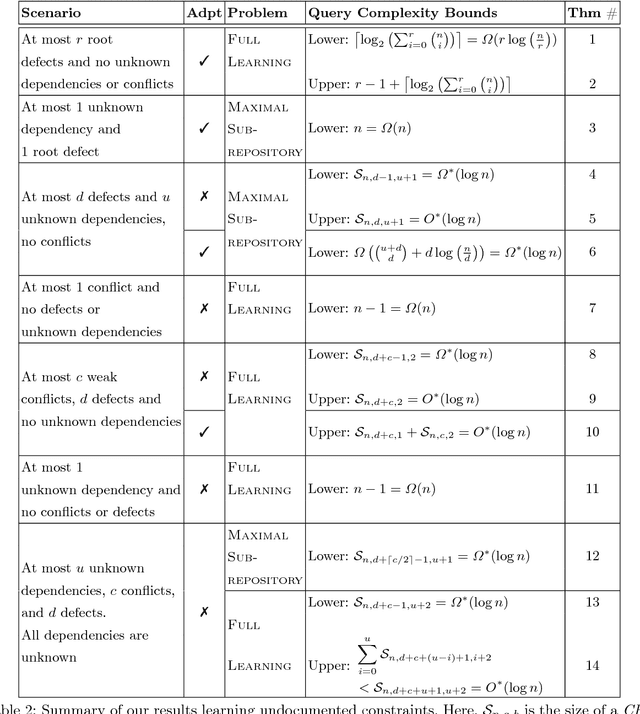
Modern software systems are expected to be secure and contain all the latest features, even when new versions of software are released multiple times an hour. Each system may include many interacting packages. The problem of installing multiple dependent packages has been extensively studied in the past, yielding some promising solutions that work well in practice. However, these assume that the developers declare all the dependencies and conflicts between the packages. Oftentimes, the entire repository structure may not be known upfront, for example when packages are developed by different vendors. In this paper we present algorithms for learning dependencies, conflicts and defective packages from installation attempts. Our algorithms use combinatorial data structures to generate queries that test installations and discover the entire dependency structure. A query that the algorithms make corresponds to trying to install a subset of packages and getting a Boolean feedback on whether all constraints were satisfied in this subset. Our goal is to minimize the query complexity of the algorithms. We prove lower and upper bounds on the number of queries that these algorithms require to make for different settings of the problem.
Using Machine Learning to Detect Noisy Neighbors in 5G Networks
Oct 24, 2016

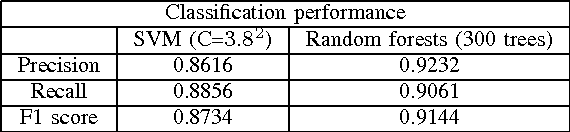
5G networks are expected to be more dynamic and chaotic in their structure than current networks. With the advent of Network Function Virtualization (NFV), Network Functions (NF) will no longer be tightly coupled with the hardware they are running on, which poses new challenges in network management. Noisy neighbor is a term commonly used to describe situations in NFV infrastructure where an application experiences degradation in performance due to the fact that some of the resources it needs are occupied by other applications in the same cloud node. These situations cannot be easily identified using straightforward approaches, which calls for the use of sophisticated methods for NFV infrastructure management. In this paper we demonstrate how Machine Learning (ML) techniques can be used to identify such events. Through experiments using data collected at real NFV infrastructure, we show that standard models for automated classification can detect the noisy neighbor phenomenon with an accuracy of more than 90% in a simple scenario.