 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmortised Design Optimization for Item Response Theory
Jul 19, 2023Item Response Theory (IRT) is a well known method for assessing responses from humans in education and psychology. In education, IRT is used to infer student abilities and characteristics of test items from student responses. Interactions with students are expensive, calling for methods that efficiently gather information for inferring student abilities. Methods based on Optimal Experimental Design (OED) are computationally costly, making them inapplicable for interactive applications. In response, we propose incorporating amortised experimental design into IRT. Here, the computational cost is shifted to a precomputing phase by training a Deep Reinforcement Learning (DRL) agent with synthetic data. The agent is trained to select optimally informative test items for the distribution of students, and to conduct amortised inference conditioned on the experiment outcomes. During deployment the agent estimates parameters from data, and suggests the next test item for the student, in close to real-time, by taking into account the history of experiments and outcomes.
Amortised Experimental Design and Parameter Estimation for User Models of Pointing
Jul 19, 2023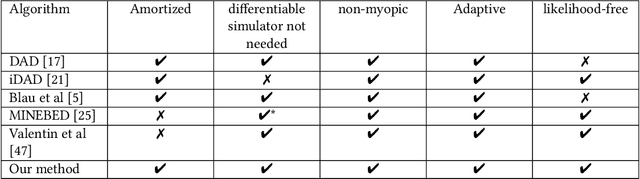
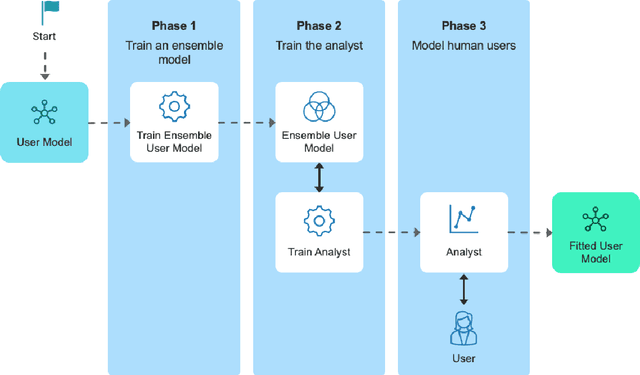
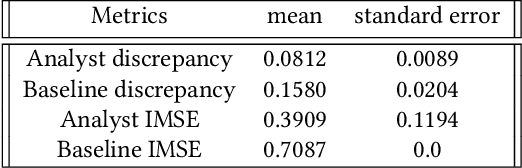
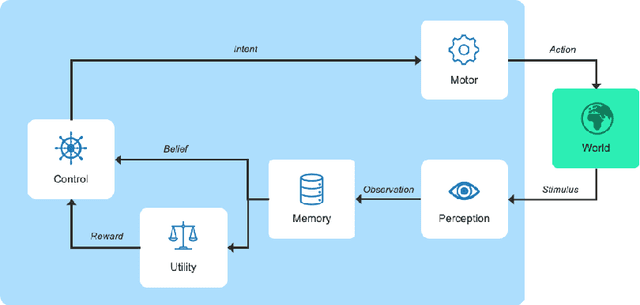
User models play an important role in interaction design, supporting automation of interaction design choices. In order to do so, model parameters must be estimated from user data. While very large amounts of user data are sometimes required, recent research has shown how experiments can be designed so as to gather data and infer parameters as efficiently as possible, thereby minimising the data requirement. In the current article, we investigate a variant of these methods that amortises the computational cost of designing experiments by training a policy for choosing experimental designs with simulated participants. Our solution learns which experiments provide the most useful data for parameter estimation by interacting with in-silico agents sampled from the model space thereby using synthetic data rather than vast amounts of human data. The approach is demonstrated for three progressively complex models of pointing.
Learning to Assist Agents by Observing Them
Oct 04, 2021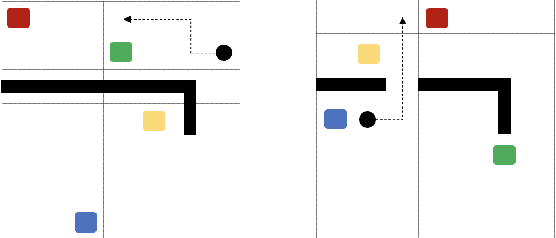
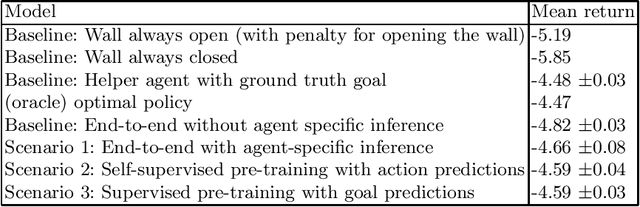
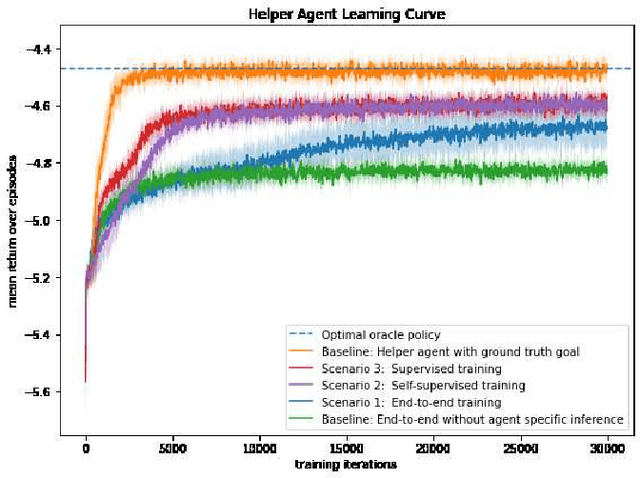
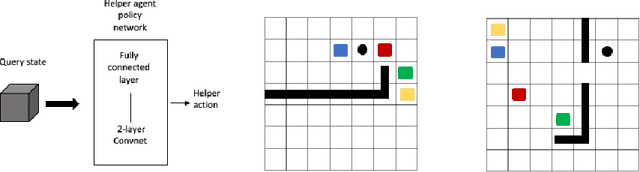
The ability of an AI agent to assist other agents, such as humans, is an important and challenging goal, which requires the assisting agent to reason about the behavior and infer the goals of the assisted agent. Training such an ability by using reinforcement learning usually requires large amounts of online training, which is difficult and costly. On the other hand, offline data about the behavior of the assisted agent might be available, but is non-trivial to take advantage of by methods such as offline reinforcement learning. We introduce methods where the capability to create a representation of the behavior is first pre-trained with offline data, after which only a small amount of interaction data is needed to learn an assisting policy. We test the setting in a gridworld where the helper agent has the capability to manipulate the environment of the assisted artificial agents, and introduce three different scenarios where the assistance considerably improves the performance of the assisted agents.
Behaviour-conditioned policies for cooperative reinforcement learning tasks
Oct 04, 2021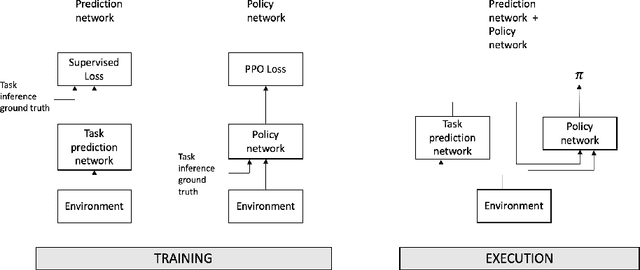
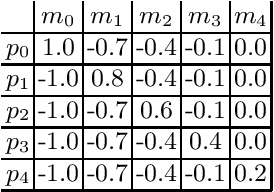
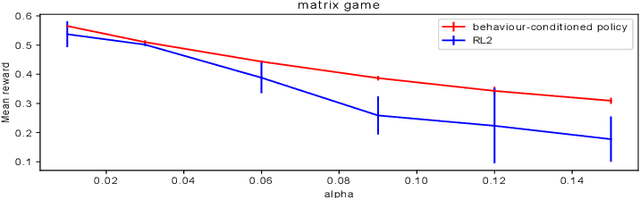
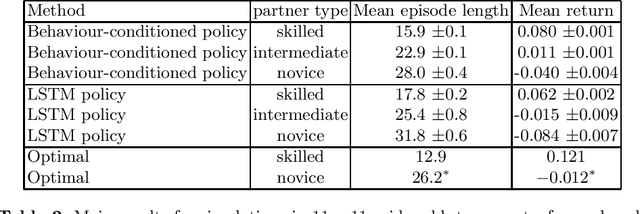
The cooperation among AI systems, and between AI systems and humans is becoming increasingly important. In various real-world tasks, an agent needs to cooperate with unknown partner agent types. This requires the agent to assess the behaviour of the partner agent during a cooperative task and to adjust its own policy to support the cooperation. Deep reinforcement learning models can be trained to deliver the required functionality but are known to suffer from sample inefficiency and slow learning. However, adapting to a partner agent behaviour during the ongoing task requires ability to assess the partner agent type quickly. We suggest a method, where we synthetically produce populations of agents with different behavioural patterns together with ground truth data of their behaviour, and use this data for training a meta-learner. We additionally suggest an agent architecture, which can efficiently use the generated data and gain the meta-learning capability. When an agent is equipped with such a meta-learner, it is capable of quickly adapting to cooperation with unknown partner agent types in new situations. This method can be used to automatically form a task distribution for meta-training from emerging behaviours that arise, for example, through self-play.