 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Assist Agents by Observing Them
Paper and Code
Oct 04, 2021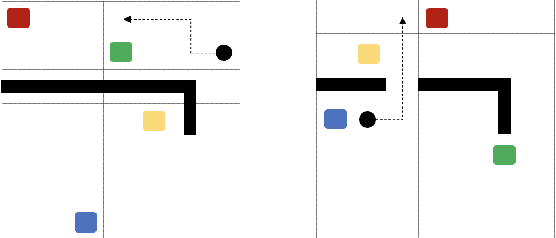
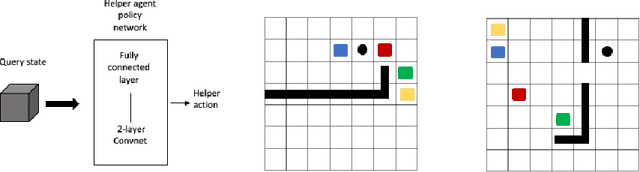
The ability of an AI agent to assist other agents, such as humans, is an important and challenging goal, which requires the assisting agent to reason about the behavior and infer the goals of the assisted agent. Training such an ability by using reinforcement learning usually requires large amounts of online training, which is difficult and costly. On the other hand, offline data about the behavior of the assisted agent might be available, but is non-trivial to take advantage of by methods such as offline reinforcement learning. We introduce methods where the capability to create a representation of the behavior is first pre-trained with offline data, after which only a small amount of interaction data is needed to learn an assisting policy. We test the setting in a gridworld where the helper agent has the capability to manipulate the environment of the assisted artificial agents, and introduce three different scenarios where the assistance considerably improves the performance of the assisted agents.