 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of SAT-based and ASP-based Algorithms for Inconsistency Measurement
Apr 28, 2023We present algorithms based on satisfiability problem (SAT) solving, as well as answer set programming (ASP), for solving the problem of determining inconsistency degrees in propositional knowledge bases. We consider six different inconsistency measures whose respective decision problems lie on the first level of the polynomial hierarchy. Namely, these are the contension inconsistency measure, the forgetting-based inconsistency measure, the hitting set inconsistency measure, the max-distance inconsistency measure, the sum-distance inconsistency measure, and the hit-distance inconsistency measure. In an extensive experimental analysis, we compare the SAT-based and ASP-based approaches with each other, as well as with a set of naive baseline algorithms. Our results demonstrate that overall, both the SAT-based and the ASP-based approaches clearly outperform the naive baseline methods in terms of runtime. The results further show that the proposed ASP-based approaches perform superior to the SAT-based ones with regard to all six inconsistency measures considered in this work. Moreover, we conduct additional experiments to explain the aforementioned results in greater detail.
Online Handbook of Argumentation for AI: Volume 2
Jun 23, 2021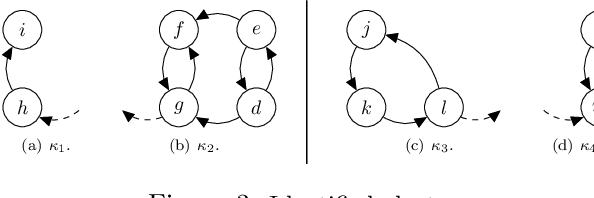
This volume contains revised versions of the papers selected for the second volume of the Online Handbook of Argumentation for AI (OHAAI). Previously, formal theories of argument and argument interaction have been proposed and studied, and this has led to the more recent study of computational models of argument. Argumentation, as a field within artificial intelligence (AI), is highly relevant for researchers interested in symbolic representations of knowledge and defeasible reasoning. The purpose of this handbook is to provide an open access and curated anthology for the argumentation research community. OHAAI is designed to serve as a research hub to keep track of the latest and upcoming PhD-driven research on the theory and application of argumentation in all areas related to AI.
Scratchy: A Lightweight Modular Autonomous Robot for Robotic Competitions
May 14, 2019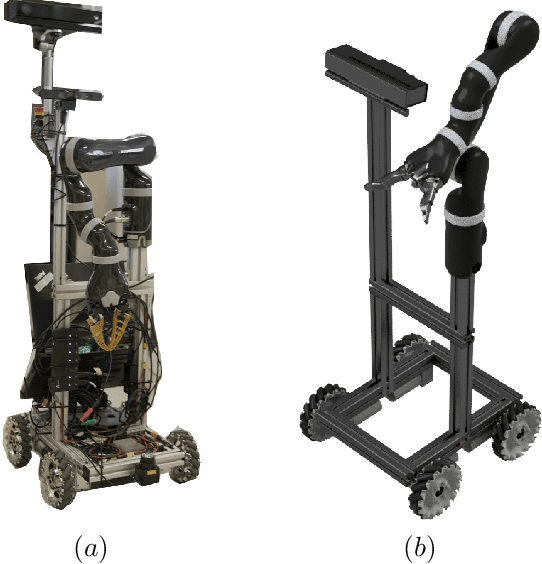
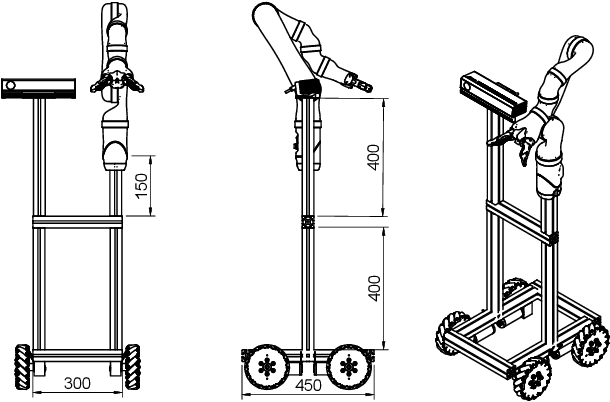
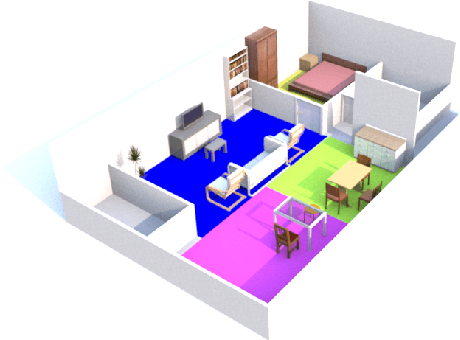
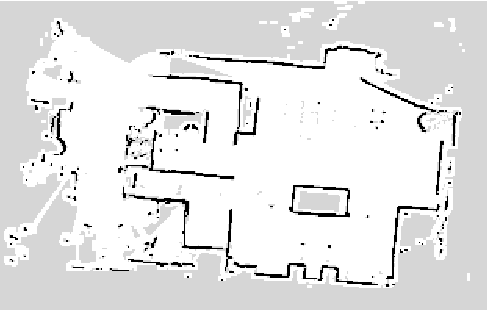
We present Scratchy---a modular, lightweight robot built for low budget competition attendances. Its base is mainly built with standard 4040 aluminium profiles and the robot is driven by four mecanum wheels on brushless DC motors. In combination with a laser range finder we use estimated odometry -- which is calculated by encoders -- for creating maps using a particle filter. A RGB-D camera is utilized for object detection and pose estimation. Additionally, there is the option to use a 6-DOF arm to grip objects from an estimated pose or generally for manipulation tasks. The robot can be assembled in less than one hour and fits into two pieces of hand luggage or one bigger suitcase. Therefore, it provides a huge advantage for student teams that participate in robot competitions like the European Robotics League or RoboCup. Thus, this keeps the funding required for participation, which is often a big hurdle for student teams to overcome, low. The software and additional hardware descriptions are available under: https://github.com/homer-robotics/scratchy.