 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration of Synthetic Images for Pedestrian Detection Using a Sequence of GANs
Jan 14, 2024Creating annotated datasets demands a substantial amount of manual effort. In this proof-of-concept work, we address this issue by proposing a novel image generation pipeline. The pipeline consists of three distinct generative adversarial networks (previously published), combined in a novel way to augment a dataset for pedestrian detection. Despite the fact that the generated images are not always visually pleasant to the human eye, our detection benchmark reveals that the results substantially surpass the baseline. The presented proof-of-concept work was done in 2020 and is now published as a technical report after a three years retention period.
Scratchy: A Lightweight Modular Autonomous Robot for Robotic Competitions
May 14, 2019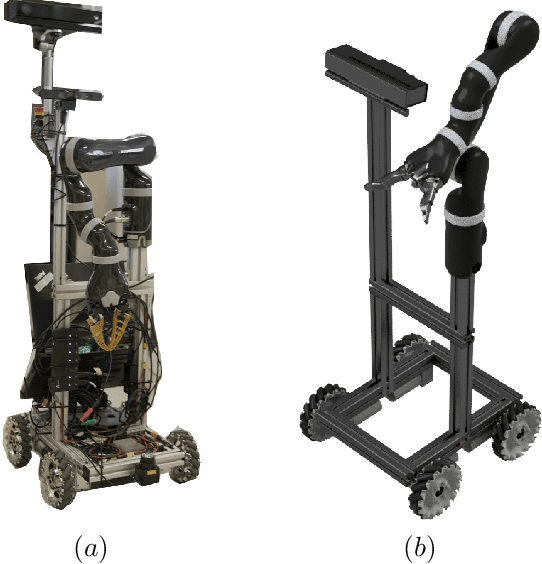
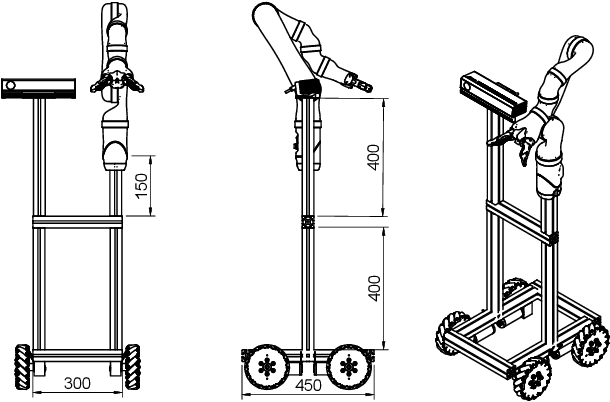
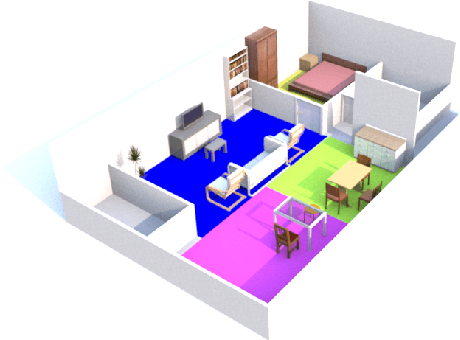
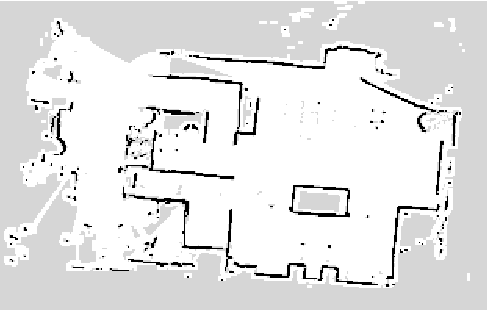
We present Scratchy---a modular, lightweight robot built for low budget competition attendances. Its base is mainly built with standard 4040 aluminium profiles and the robot is driven by four mecanum wheels on brushless DC motors. In combination with a laser range finder we use estimated odometry -- which is calculated by encoders -- for creating maps using a particle filter. A RGB-D camera is utilized for object detection and pose estimation. Additionally, there is the option to use a 6-DOF arm to grip objects from an estimated pose or generally for manipulation tasks. The robot can be assembled in less than one hour and fits into two pieces of hand luggage or one bigger suitcase. Therefore, it provides a huge advantage for student teams that participate in robot competitions like the European Robotics League or RoboCup. Thus, this keeps the funding required for participation, which is often a big hurdle for student teams to overcome, low. The software and additional hardware descriptions are available under: https://github.com/homer-robotics/scratchy.