 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDyads: Artist-Centric, AI-Generated Dance Duets
Mar 05, 2025



Existing AI-generated dance methods primarily train on motion capture data from solo dance performances, but a critical feature of dance in nearly any genre is the interaction of two or more bodies in space. Moreover, many works at the intersection of AI and dance fail to incorporate the ideas and needs of the artists themselves into their development process, yielding models that produce far more useful insights for the AI community than for the dance community. This work addresses both needs of the field by proposing an AI method to model the complex interactions between pairs of dancers and detailing how the technical methodology can be shaped by ongoing co-creation with the artistic stakeholders who curated the movement data. Our model is a probability-and-attention-based Variational Autoencoder that generates a choreographic partner conditioned on an input dance sequence. We construct a custom loss function to enhance the smoothness and coherence of the generated choreography. Our code is open-source, and we also document strategies for other interdisciplinary research teams to facilitate collaboration and strong communication between artists and technologists.
Invisible Strings: Revealing Latent Dancer-to-Dancer Interactions with Graph Neural Networks
Mar 04, 2025



Dancing in a duet often requires a heightened attunement to one's partner: their orientation in space, their momentum, and the forces they exert on you. Dance artists who work in partnered settings might have a strong embodied understanding in the moment of how their movements relate to their partner's, but typical documentation of dance fails to capture these varied and subtle relationships. Working closely with dance artists interested in deepening their understanding of partnering, we leverage Graph Neural Networks (GNNs) to highlight and interpret the intricate connections shared by two dancers. Using a video-to-3D-pose extraction pipeline, we extract 3D movements from curated videos of contemporary dance duets, apply a dedicated pre-processing to improve the reconstruction, and train a GNN to predict weighted connections between the dancers. By visualizing and interpreting the predicted relationships between the two movers, we demonstrate the potential for graph-based methods to construct alternate models of the collaborative dynamics of duets. Finally, we offer some example strategies for how to use these insights to inform a generative and co-creative studio practice.
Beyond Imitation: Generative and Variational Choreography via Machine Learning
Jul 11, 2019

Our team of dance artists, physicists, and machine learning researchers has collectively developed several original, configurable machine-learning tools to generate novel sequences of choreography as well as tunable variations on input choreographic sequences. We use recurrent neural network and autoencoder architectures from a training dataset of movements captured as 53 three-dimensional points at each timestep. Sample animations of generated sequences and an interactive version of our model can be found at http: //www.beyondimitation.com.
Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems
Dec 21, 2017
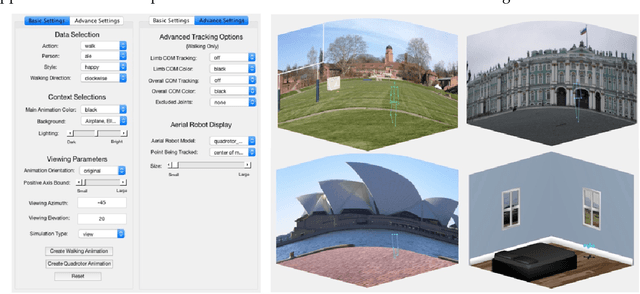

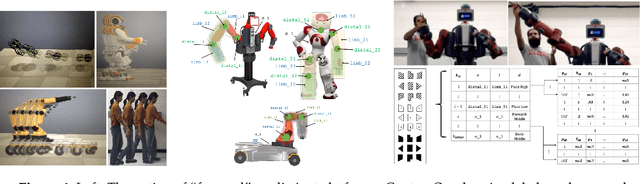
As robotic systems are moved out of factory work cells into human-facing environments questions of choreography become central to their design, placement, and application. With a human viewer or counterpart present, a system will automatically be interpreted within context, style of movement, and form factor by human beings as animate elements of their environment. The interpretation by this human counterpart is critical to the success of the system's integration: knobs on the system need to make sense to a human counterpart; an artificial agent should have a way of notifying a human counterpart of a change in system state, possibly through motion profiles; and the motion of a human counterpart may have important contextual clues for task completion. Thus, professional choreographers, dance practitioners, and movement analysts are critical to research in robotics. They have design methods for movement that align with human audience perception, can identify simplified features of movement for human-robot interaction goals, and have detailed knowledge of the capacity of human movement. This article provides approaches employed by one research lab, specific impacts on technical and artistic projects within, and principles that may guide future such work. The background section reports on choreography, somatic perspectives, improvisation, the Laban/Bartenieff Movement System, and robotics. From this context methods including embodied exercises, writing prompts, and community building activities have been developed to facilitate interdisciplinary research. The results of this work is presented as an overview of a smattering of projects in areas like high-level motion planning, software development for rapid prototyping of movement, artistic output, and user studies that help understand how people interpret movement. Finally, guiding principles for other groups to adopt are posited.