 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Energy Impact of Domain Model Design in Classical Planning
Jan 29, 2026AI research has traditionally prioritised algorithmic performance, such as optimising accuracy in machine learning or runtime in automated planning. The emerging paradigm of Green AI challenges this by recognising energy consumption as a critical performance dimension. Despite the high computational demands of automated planning, its energy efficiency has received little attention. This gap is particularly salient given the modular planning structure, in which domain models are specified independently of algorithms. On the other hand, this separation also enables systematic analysis of energy usage through domain model design. We empirically investigate how domain model characteristics affect the energy consumption of classical planners. We introduce a domain model configuration framework that enables controlled variation of features, such as element ordering, action arity, and dead-end states. Using five benchmark domains and five state-of-the-art planners, we analyse energy and runtime impacts across 32 domain variants per benchmark. Results demonstrate that domain-level modifications produce measurable energy differences across planners, with energy consumption not always correlating with runtime.
Seeing is Believing (and Predicting): Context-Aware Multi-Human Behavior Prediction with Vision Language Models
Dec 17, 2025Accurately predicting human behaviors is crucial for mobile robots operating in human-populated environments. While prior research primarily focuses on predicting actions in single-human scenarios from an egocentric view, several robotic applications require understanding multiple human behaviors from a third-person perspective. To this end, we present CAMP-VLM (Context-Aware Multi-human behavior Prediction): a Vision Language Model (VLM)-based framework that incorporates contextual features from visual input and spatial awareness from scene graphs to enhance prediction of humans-scene interactions. Due to the lack of suitable datasets for multi-human behavior prediction from an observer view, we perform fine-tuning of CAMP-VLM with synthetic human behavior data generated by a photorealistic simulator, and evaluate the resulting models on both synthetic and real-world sequences to assess their generalization capabilities. Leveraging Supervised Fine-Tuning (SFT) and Direct Preference Optimization (DPO), CAMP-VLM outperforms the best-performing baseline by up to 66.9% in prediction accuracy.
Introduction to AI Planning
Dec 16, 2024



These are notes for lectures presented at the University of Stuttgart that provide an introduction to key concepts and techniques in AI Planning. Artificial Intelligence Planning, also known as Automated Planning, emerged somewhere in 1966 from the need to give autonomy to a wheeled robot. Since then, it has evolved into a flourishing research and development discipline, often associated with scheduling. Over the decades, various approaches to planning have been developed with characteristics that make them appropriate for specific tasks and applications. Most approaches represent the world as a state within a state transition system; then the planning problem becomes that of searching a path in the state space from the current state to one which satisfies the goals of the user. The notes begin by introducing the state model and move on to exploring classical planning, the foundational form of planning, and present fundamental algorithms for solving such problems. Subsequently, we examine planning as a constraint satisfaction problem, outlining the mapping process and describing an approach to solve such problems. The most extensive section is dedicated to Hierarchical Task Network (HTN) planning, one of the most widely used and powerful planning techniques in the field. The lecture notes end with a bonus chapter on the Planning Domain Definition (PDDL) Language, the de facto standard syntax for representing non-hierarchical planning problems.
Towards Human Awareness in Robot Task Planning with Large Language Models
Apr 17, 2024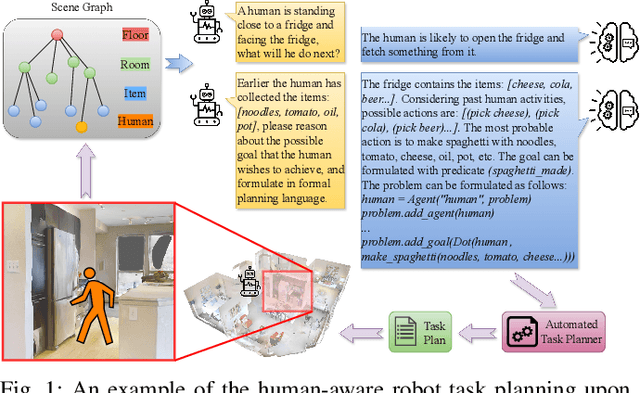
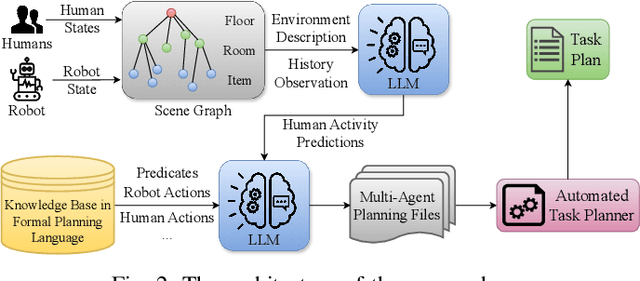
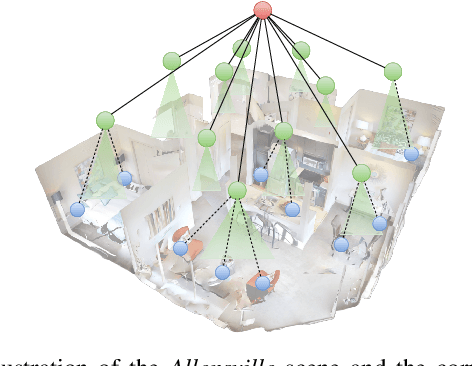
The recent breakthroughs in the research on Large Language Models (LLMs) have triggered a transformation across several research domains. Notably, the integration of LLMs has greatly enhanced performance in robot Task And Motion Planning (TAMP). However, previous approaches often neglect the consideration of dynamic environments, i.e., the presence of dynamic objects such as humans. In this paper, we propose a novel approach to address this gap by incorporating human awareness into LLM-based robot task planning. To obtain an effective representation of the dynamic environment, our approach integrates humans' information into a hierarchical scene graph. To ensure the plan's executability, we leverage LLMs to ground the environmental topology and actionable knowledge into formal planning language. Most importantly, we use LLMs to predict future human activities and plan tasks for the robot considering the predictions. Our contribution facilitates the development of integrating human awareness into LLM-driven robot task planning, and paves the way for proactive robot decision-making in dynamic environments.
DELTA: Decomposed Efficient Long-Term Robot Task Planning using Large Language Models
Apr 04, 2024



Recent advancements in Large Language Models (LLMs) have sparked a revolution across various research fields. In particular, the integration of common-sense knowledge from LLMs into robot task and motion planning has been proven to be a game-changer, elevating performance in terms of explainability and downstream task efficiency to unprecedented heights. However, managing the vast knowledge encapsulated within these large models has posed challenges, often resulting in infeasible plans generated by LLM-based planning systems due to hallucinations or missing domain information. To overcome these challenges and obtain even greater planning feasibility and computational efficiency, we propose a novel LLM-driven task planning approach called DELTA. For achieving better grounding from environmental topology into actionable knowledge, DELTA leverages the power of scene graphs as environment representations within LLMs, enabling the fast generation of precise planning problem descriptions. For obtaining higher planning performance, we use LLMs to decompose the long-term task goals into an autoregressive sequence of sub-goals for an automated task planner to solve. Our contribution enables a more efficient and fully automatic task planning pipeline, achieving higher planning success rates and significantly shorter planning times compared to the state of the art.
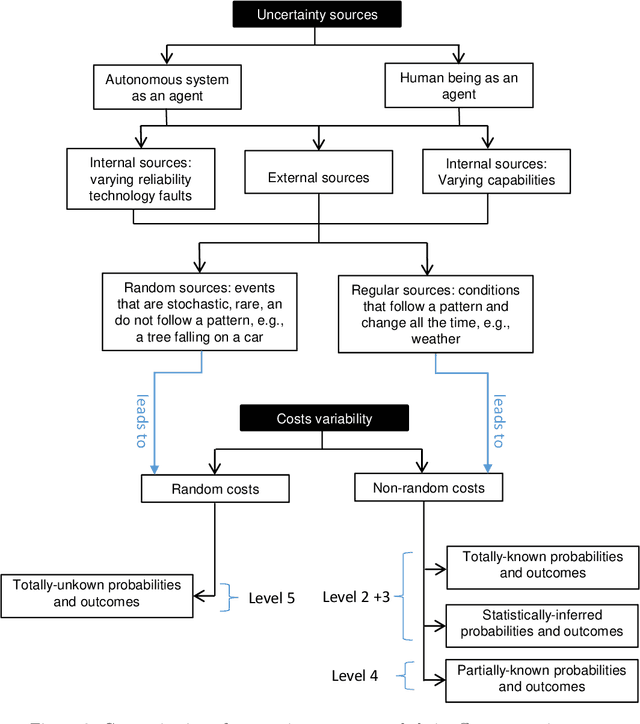
Understanding Real-World AI Planning Domains: A Conceptual Framework
Jul 10, 2023Planning is a pivotal ability of any intelligent system being developed for real-world applications. AI planning is concerned with researching and developing planning systems that automatically compute plans that satisfy some user objective. Identifying and understanding the relevant and realistic aspects that characterise real-world application domains are crucial to the development of AI planning systems. This provides guidance to knowledge engineers and software engineers in the process of designing, identifying, and categorising resources required for the development process. To the best of our knowledge, such support does not exist. We address this research gap by developing a conceptual framework that identifies and categorises the aspects of real-world planning domains in varying levels of granularity. Our framework provides not only a common terminology but also a comprehensive overview of a broad range of planning aspects exemplified using the domain of sustainable buildings as a prominent application domain of AI planning. The framework has the potential to impact the design, development, and applicability of AI planning systems in real-world application domains.
Service Composition in the ChatGPT Era
May 25, 2023The paper speculates about how ChatGPT-like systems can support the field of automated service composition and identifies new research areas to explore in order to take advantage of such tools in the field of service-oriented composition.
Risk Awareness in HTN Planning
Apr 22, 2022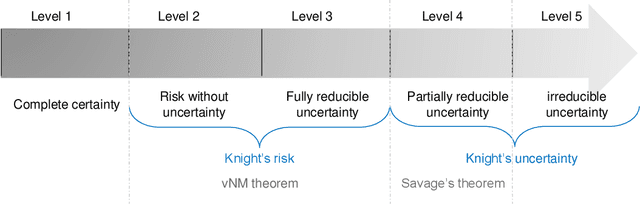
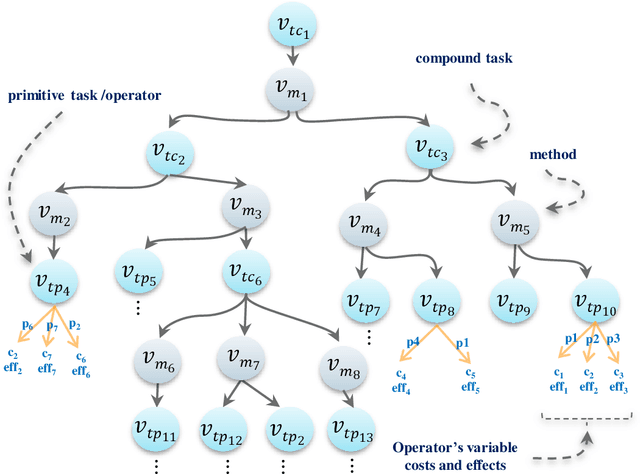
Actual real-world domains are characterised by uncertain situations in which acting and use of resources require embracing risk. Performing actions in such domains always entails costs of consuming some resource, such as time, money, or energy, where the knowledge about these costs can range from totally known to totally unknown and even unknowable probabilities of costs. Think of robotic domains, where actions and their costs are non-deterministic due to uncertain factors like obstacles. Choosing which action to perform considering its cost on the available resource requires taking a stance on risk. Thus, these domains call for not only planning under uncertainty but also planning while embracing risk. Taking Hierarchical Task Network (HTN) planning as a widely used planning technique in real-world applications, one can observe that existing approaches do not account for risk. That is, computing most probable or optimal plans using actions with single-valued costs is only enough to express risk neutrality. In this work, we postulate that HTN planning can become risk aware by considering expected utility theory, a representative concept of decision theory that enables choosing actions considering a probability distribution of their costs and a given risk attitude expressed using a utility function. In particular, we introduce a general framework for HTN planning that allows modelling risk and uncertainty using a probability distribution of action costs upon which we define risk-aware HTN planning as an approach that accounts for the different risk attitudes and allows computing plans that go beyond risk neutrality. In fact, we layout that computing risk-aware plans requires finding plans with the highest expected utility. Finally, we argue that it is possible for HTN planning agents to solve specialised risk-aware HTN planning problems by adapting some existing HTN planning approaches.
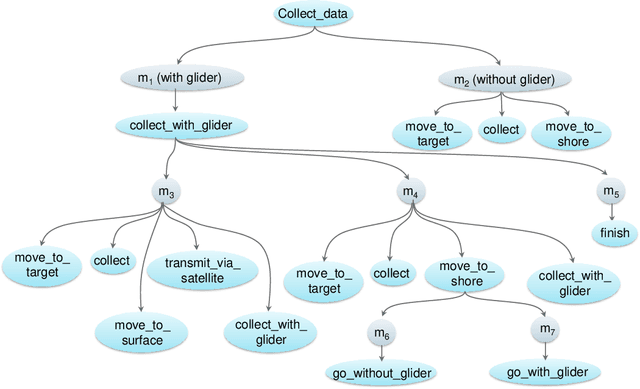
HTN Planning Domain for Deployment of Cloud Applications
Apr 16, 2021Cloud providers are facing a complex problem in configuring software applications ready for deployment on their infrastructures. Hierarchical Task Network (HTN) planning can provide effective means to solve such deployment problems. We present an HTN planning domain that models deployment problems as found in realistic Cloud environments.
Software Architecture for Next-Generation AI Planning Systems
Feb 22, 2021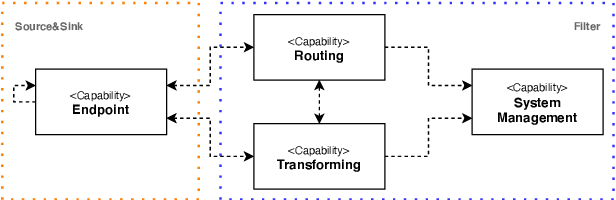
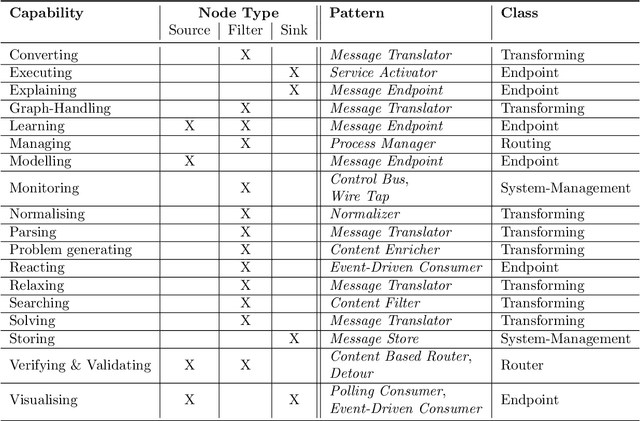
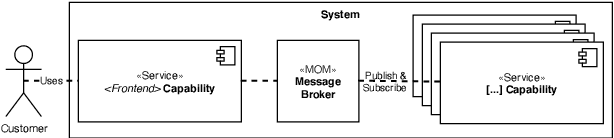
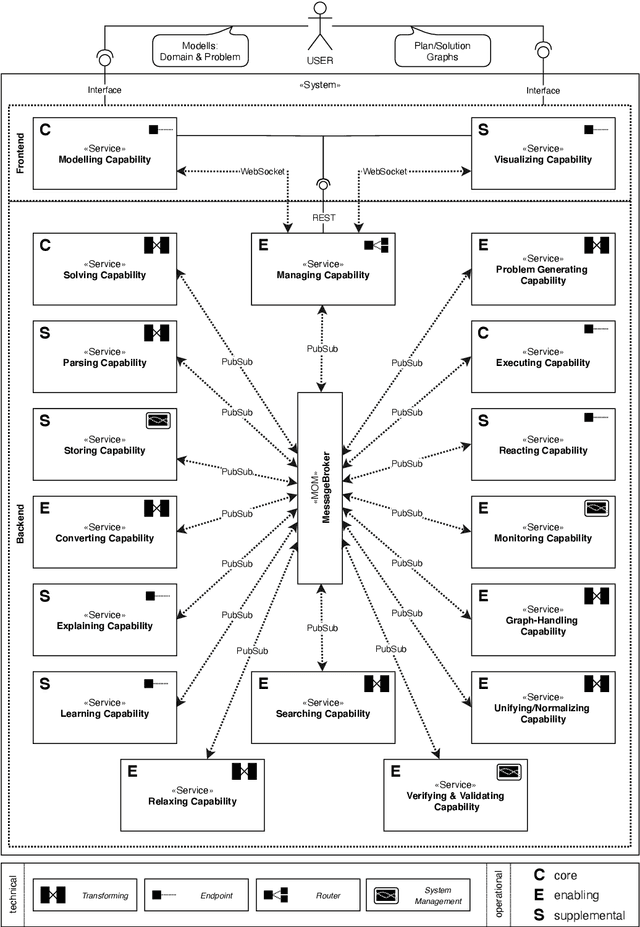
Artificial Intelligence (AI) planning is a flourishing research and development discipline that provides powerful tools for searching a course of action that achieves some user goal. While these planning tools show excellent performance on benchmark planning problems, they represent challenging software systems when it comes to their use and integration in real-world applications. In fact, even in-depth understanding of their internal mechanisms does not guarantee that one can successfully set up, use and manipulate existing planning tools. We contribute toward alleviating this situation by proposing a service-oriented planning architecture to be at the core of the ability to design, develop and use next-generation AI planning systems. We collect and classify common planning capabilities to form the building blocks of the planning architecture. We incorporate software design principles and patterns into the architecture to allow for usability, interoperability and reusability of the planning capabilities. Our prototype planning system demonstrates the potential of our approach for rapid prototyping and flexibility of system composition. Finally, we provide insight into the qualitative advantages of our approach when compared to a typical planning tool.