 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Human Awareness in Robot Task Planning with Large Language Models
Paper and Code
Apr 17, 2024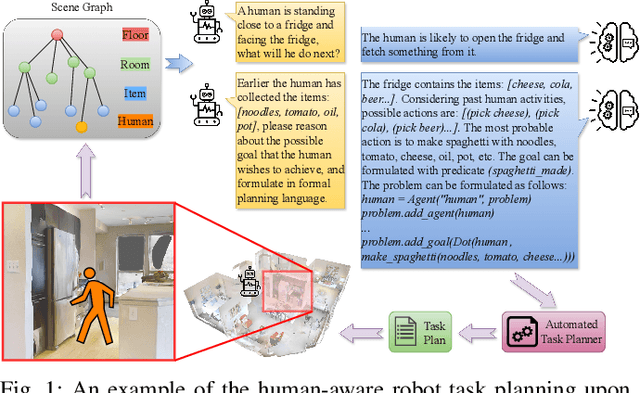
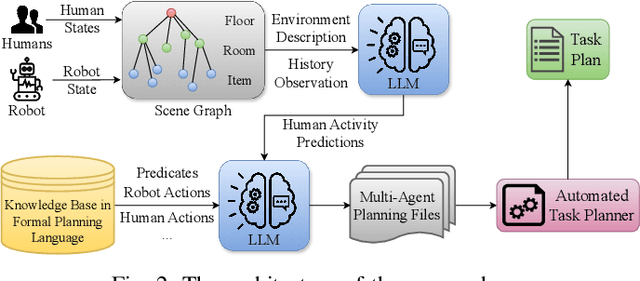
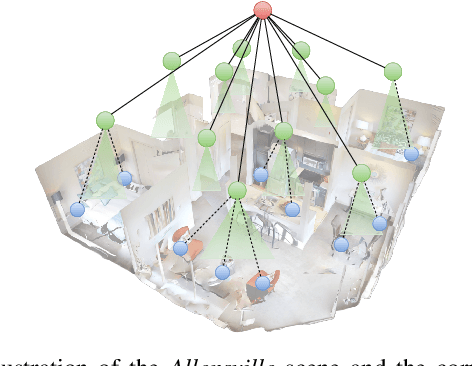
The recent breakthroughs in the research on Large Language Models (LLMs) have triggered a transformation across several research domains. Notably, the integration of LLMs has greatly enhanced performance in robot Task And Motion Planning (TAMP). However, previous approaches often neglect the consideration of dynamic environments, i.e., the presence of dynamic objects such as humans. In this paper, we propose a novel approach to address this gap by incorporating human awareness into LLM-based robot task planning. To obtain an effective representation of the dynamic environment, our approach integrates humans' information into a hierarchical scene graph. To ensure the plan's executability, we leverage LLMs to ground the environmental topology and actionable knowledge into formal planning language. Most importantly, we use LLMs to predict future human activities and plan tasks for the robot considering the predictions. Our contribution facilitates the development of integrating human awareness into LLM-driven robot task planning, and paves the way for proactive robot decision-making in dynamic environments.