 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk Awareness in HTN Planning
Paper and Code
Apr 22, 2022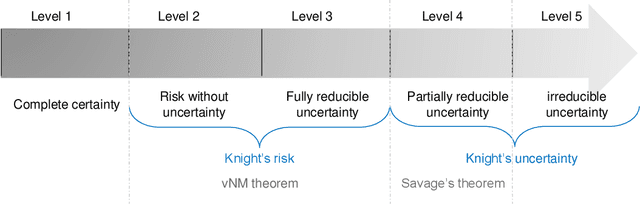
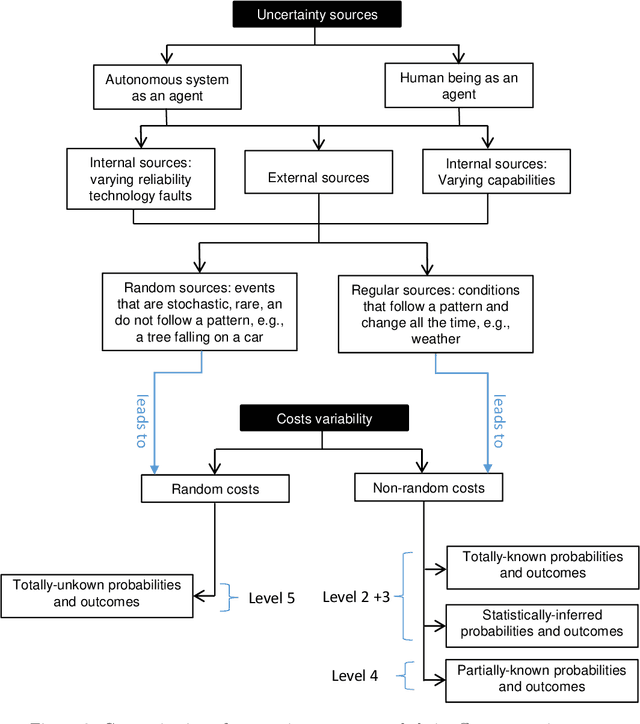
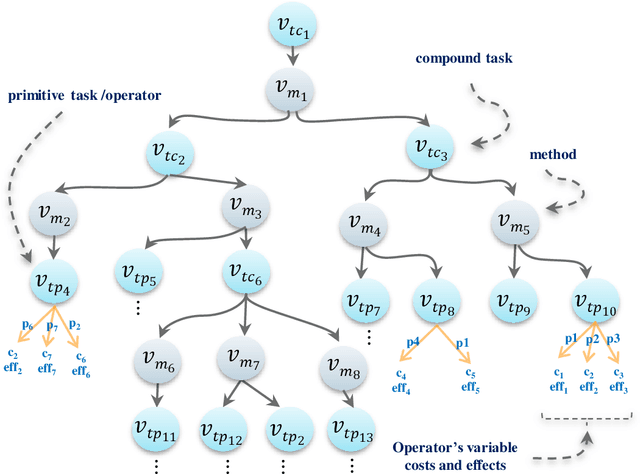
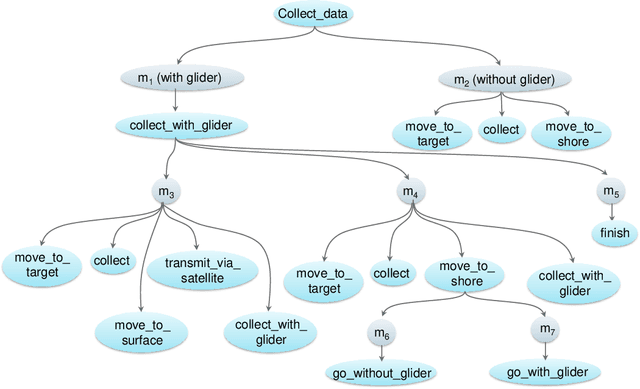
Actual real-world domains are characterised by uncertain situations in which acting and use of resources require embracing risk. Performing actions in such domains always entails costs of consuming some resource, such as time, money, or energy, where the knowledge about these costs can range from totally known to totally unknown and even unknowable probabilities of costs. Think of robotic domains, where actions and their costs are non-deterministic due to uncertain factors like obstacles. Choosing which action to perform considering its cost on the available resource requires taking a stance on risk. Thus, these domains call for not only planning under uncertainty but also planning while embracing risk. Taking Hierarchical Task Network (HTN) planning as a widely used planning technique in real-world applications, one can observe that existing approaches do not account for risk. That is, computing most probable or optimal plans using actions with single-valued costs is only enough to express risk neutrality. In this work, we postulate that HTN planning can become risk aware by considering expected utility theory, a representative concept of decision theory that enables choosing actions considering a probability distribution of their costs and a given risk attitude expressed using a utility function. In particular, we introduce a general framework for HTN planning that allows modelling risk and uncertainty using a probability distribution of action costs upon which we define risk-aware HTN planning as an approach that accounts for the different risk attitudes and allows computing plans that go beyond risk neutrality. In fact, we layout that computing risk-aware plans requires finding plans with the highest expected utility. Finally, we argue that it is possible for HTN planning agents to solve specialised risk-aware HTN planning problems by adapting some existing HTN planning approaches.