 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Timed Elastic Band Planner for Collision-Free Navigation in Unknown Environments
Dec 04, 2024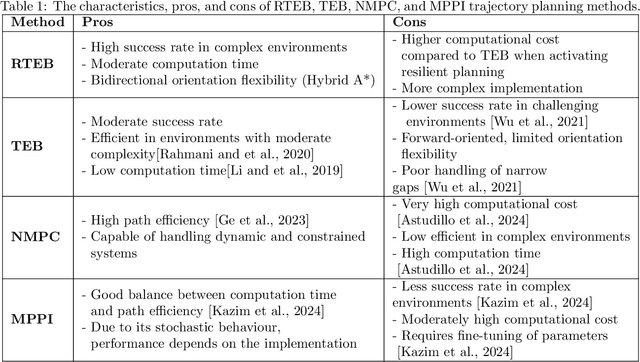
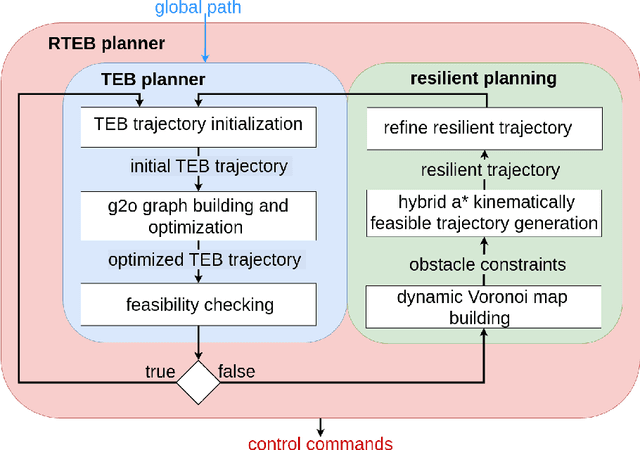
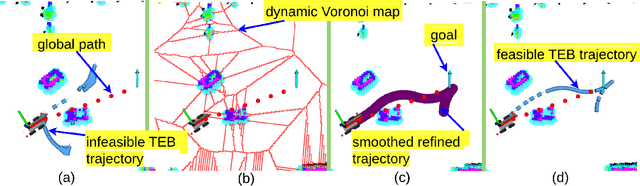
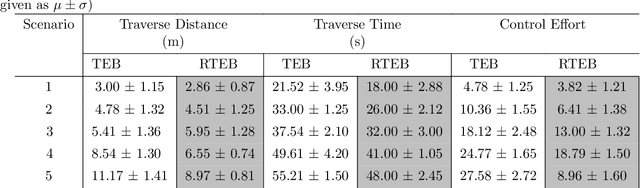
In autonomous navigation, trajectory replanning, refinement, and control command generation are essential for effective motion planning. This paper presents a resilient approach to trajectory replanning addressing scenarios where the initial planner's solution becomes infeasible. The proposed method incorporates a hybrid A* algorithm to generate feasible trajectories when the primary planner fails and applies a soft constraints-based smoothing technique to refine these trajectories, ensuring continuity, obstacle avoidance, and kinematic feasibility. Obstacle constraints are modelled using a dynamic Voronoi map to improve navigation through narrow passages. This approach enhances the consistency of trajectory planning, speeds up convergence, and meets real-time computational requirements. In environments with around 30\% or higher obstacle density, the ratio of free space before and after placing new obstacles, the Resilient Timed Elastic Band (RTEB) planner achieves approximately 20\% reduction in traverse distance, traverse time, and control effort compared to the Timed Elastic Band (TEB) planner and Nonlinear Model Predictive Control (NMPC) planner. These improvements demonstrate the RTEB planner's potential for application in field robotics, particularly in agricultural and industrial environments, where navigating unstructured terrain is crucial for ensuring efficiency and operational resilience.
End-to-end Unsupervised Learning of Long-Term 3D Stable objects
Jan 26, 2023



3D point cloud semantic classification is an important task in robotics as it enables a better understanding of the mapped environment. This work proposes to learn the long-term stability of the 3D objects using a neural network based on PointNet++, where the long-term stable object refers to a static object that cannot move on its own (e.g. tree, pole, building). The training data is generated in an unsupervised manner by assigning a continuous label to individual points by exploiting multiple time slices of the same environment. Instead of using discrete labels, i.e. static/dynamic, we propose to use a continuous label value indicating point temporal stability to train a regression PointNet++ network. We evaluated our approach on point cloud data of two parking lots from the NCLT dataset. The experiments' performance reveals that static vs dynamic object classification is best performed by training a regression model, followed by thresholding, compared to directly training a classification model.
Collection and Evaluation of a Long-Term 4D Agri-Robotic Dataset
Nov 25, 2022



Long-term autonomy is one of the most demanded capabilities looked into a robot. The possibility to perform the same task over and over on a long temporal horizon, offering a high standard of reproducibility and robustness, is appealing. Long-term autonomy can play a crucial role in the adoption of robotics systems for precision agriculture, for example in assisting humans in monitoring and harvesting crops in a large orchard. With this scope in mind, we report an ongoing effort in the long-term deployment of an autonomous mobile robot in a vineyard for data collection across multiple months. The main aim is to collect data from the same area at different points in time so to be able to analyse the impact of the environmental changes in the mapping and localisation tasks. In this work, we present a map-based localisation study taking 4 data sessions. We identify expected failures when the pre-built map visually differs from the environment's current appearance and we anticipate LTS-Net, a solution pointed at extracting stable temporal features for improving long-term 4D localisation results.
Benchmark of visual and 3D lidar SLAM systems in simulation environment for vineyards
Jul 12, 2021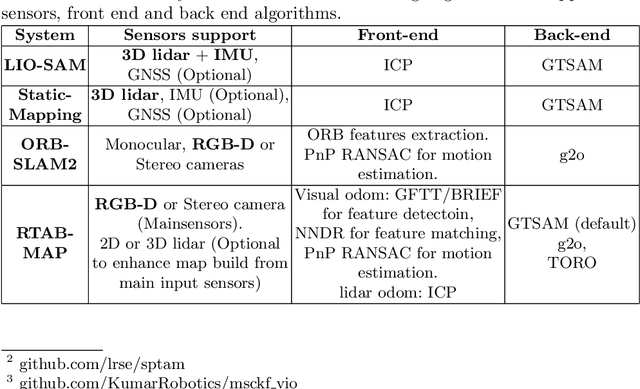
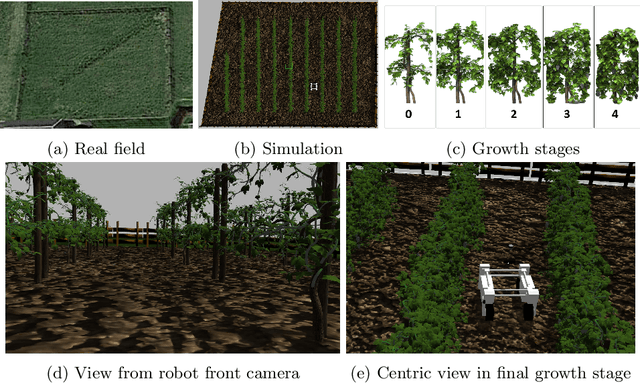
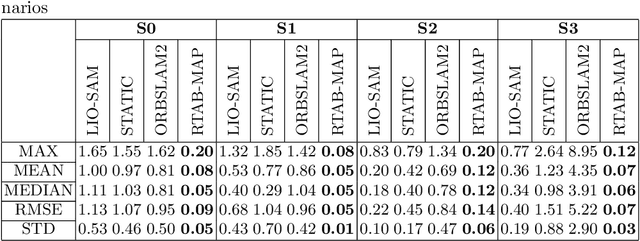
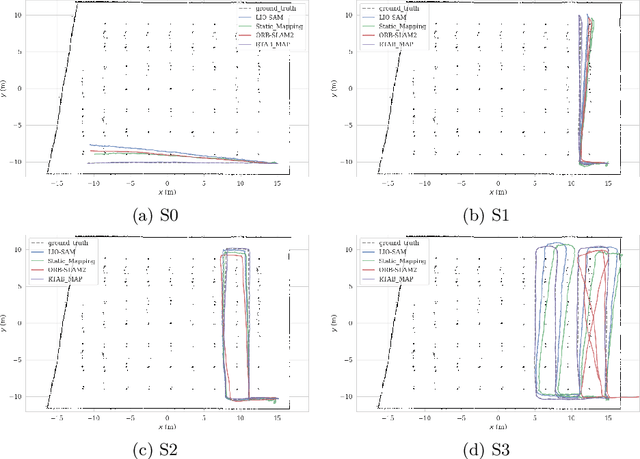
In this work, we present a comparative analysis of the trajectories estimated from various Simultaneous Localization and Mapping (SLAM) systems in a simulation environment for vineyards. Vineyard environment is challenging for SLAM methods, due to visual appearance changes over time, uneven terrain, and repeated visual patterns. For this reason, we created a simulation environment specifically for vineyards to help studying SLAM systems in such a challenging environment. We evaluated the following SLAM systems: LIO-SAM, StaticMapping, ORB-SLAM2, and RTAB-MAP in four different scenarios. The mobile robot used in this study equipped with 2D and 3D lidars, IMU, and RGB-D camera (Kinect v2). The results show good and encouraging performance of RTAB-MAP in such an environment.